고정 헤더 영역
상세 컨텐츠
본문
이전 글...
드론 만들기
하드웨어
QGroundControl에서 변속기(ESC) 교정하기
Pixhawk 4의 Power Management Board
QGroundControl에서 Pixhawk 4 펌웨어 설치
QGroundControl에서 Pixhawk 4 설정하기 1/2
QGroundControl에서 Pixhawk 4 설정하기 2/2
파워 분배기(PDB, Power Distribution Board)
소프트웨어
MissionPlanner와 QGroundControl
QGroundControl에서 Pixhawk 4 펌웨어 설치
QGroundControl에서 Pixhawk 4 설정하기 1/2
QGroundControl에서 Pixhawk 4 설정하기 2/2
QGroundControl에서 Pixhawk 파라미터 변경하기
VMware Workstation Player에 Virtaul Machine 만들기
VMware Workstation Player에 Ubuntu 설치하기
조립
Power Management Board에 커넥터 연결하기
변속기(ESC)와 Power Management Board 연결하기
QGroundControl에서 변속기(ESC) 교정하기
GPS, Telemetry Pixhawk 4에 연결하기
통신
개발
비행
문제해결
Pixhawk와 Emax ESC(변속기) 호환문제 해결방법
기타
완전 초짜의 드론 만들기 도전! 도전! 도전~!입니다.
맨땅에 헤딩~
인터넷 검색, 관련 사이트를 참고하여 Pixhawk 4(PX4)를 이용한 중/소형 쿼드콥터 드론을 만들려고 하고 있습니다.
참고만 하세요~!
※ 아래 내용은 픽스호크 홈페이지 내용을 기반으로 작성한 것으로 틀린 내용을 포함하고 있을 수도 있습니다.
※ 정확한/상세한 내용은 Pixhawk 홈페이지 참조하세요.
픽스호크 비행 제어기(flight controller)로 드론을 만들려고 할 때 필요한 기본 부품을 구매해서 조립한 후 펌웨어 업데이트하고 기본 설정을 마친 후 조종기로 드론을 비행할 수도 있다.
(물론 초짜에게 이 한 줄의 과정이 험난한 고행길과 같지만...)
하지만 드론을 조립해서 비행하는 것을 넘어서 좀... 나에게 필요한 기능을 좀 추가하고 싶어 코드를 프로그래밍했다면 프로그래밍한 코드를 실제 드론에 바로 적용해보기 전에 시뮬레이터를 사용해서 성능을 시험해보는 게 안전성 측면 등 여러 모로 좋다.
다행히 PX4도 몇몇 시뮬레이터(simulator)를 지원한다.
([드론 만들기] 드론 비행 시뮬레이터(Simulator) 참조)cd
아직 어떤 드론을 만들지 구체적으로 정리가 되지는 않았지만 그래도 이왕 만드는 거 픽스호크 홈페이지에 있는 거 시도는 한번 해보자는 욕심에 시뮬레이터를 설치하기로 했다.
PX4는 다양한 운영체제에서 빌드 가능한 PX4 타깃(target)들을 지원한다.

위의 표에서도 보듯이 windows를 지원하는 PX4 타깃은 타 운영체제보다 적고 실제 사용을 해보니 안정성도 떨어진다. 그렇다고 없는 애플 컴퓨터를 구매하기도 그렇고 해서 Pixhawk 홈페이지에서 권고하는 운영체제인 Ubuntu를 사용하기로 했다.
(windows에서 몇몇 소프트웨어를 사용해보니 안정성이 Ubuntu에 비해 많이 떨어져서 개인적으로 비추천이다.)
Ubuntu에서 빌드 가능한 PX4 타깃은 위의 표에서 언급된 것보다 더 많다.
Pixhawk and other NuttX-based hardware
jMAVSim Simulation
Gazebo Simulation
Raspberry Pi
ROS (1) (Robotics Operating System)
Fast DDS - Required for ROS2
Snapdragon Flight (지원 중단)
운영체제도 선택했으니 이제는 설치할 PX4 타깃만 선택하면 되는데 그전에 유의해야 할 점이 있다.
위의 PX4 타깃 중 ROS의 경우에는 Ubuntu 18.04에만 설치 가능하며 다른 PX4 타깃은 Ubuntu 18.04와 20.04에서만 가능하다.
설치는 간단하다.
픽스호크 홈페이지에서 제공하는 배시 스크립트(bash scripts)를 설치하면 되는데 개발 환경을 쉽게 설치할 수 있도록 두 개의 배시 스크립트를 제공한다.

ROS는 사용할 계획이 없기 때문에 여기서는 Ubuntu 18.04에 Gazebo. JMAVSim, Nuttx(Pixhawk) 툴체인만을 설치한다.
툴 체인을 설치하기 전에 먼저 PX4 소스코드를 다운로드해야 한다.
Ubuntu의 터미널에서 PX4 소스코드를 다운로드할 디렉터리로 이동한 후 아래와 같이 명령어를 입력한다.

엔터를 누르면 다운로드가 시작되고 몇 분 후 완료된다.

이어서 배시 스크립트를 설치한다.
먼저 PX4 소스코드가 다운로드되어 있는 폴더로 이동한 후 아래와 같이 설치 명령어를 터미널에 입력한다.
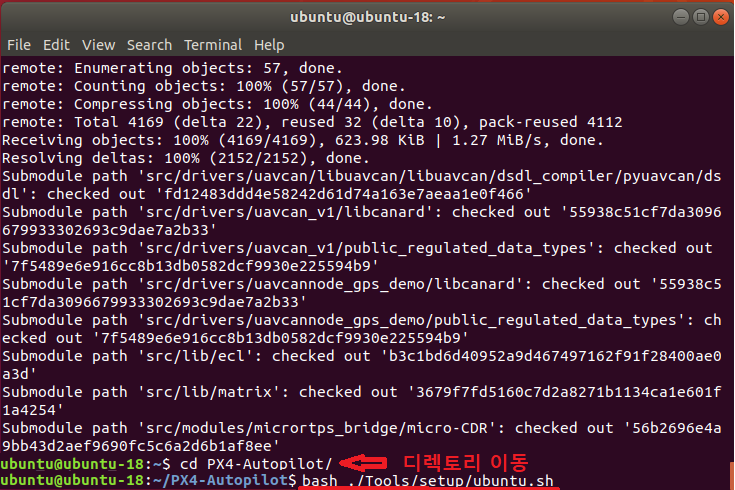
엔터를 눌러 명령어를 실행시킨 후 사용자 비밀번호를 입력하라는 메시지가 뜨면 입력한다.
설치 도중 아래와 같은 업그레이드 창이 뜨면 Install Now를 클릭해서 소프트웨어를 업데이트한다.

소프트웨어 업데이트를 하지 않으면 설치가 멈춘다.
수분 후 설치가 완료된다.

툴체인 설치 시 nuttx나 시뮬레이션 툴을 제외하고 싶을 경우에는 배시 스크립트 명령어 뒤에 아래와 같이 선택 명령어를 추가하면 된다.
nuttx 제외:

시뮬레이션 툴 제외:

만약 라즈베리 용 툴체인, ROS/Gazebo 용 툴체인 또는 다른 운영체제에 툴체인을 설치하고자 할 경우에는 Pixhawk 홈페이지 참조한다.
시뮬레이터에 대해서는 [드론 만들기] jMAVSimulation 사용하기, [드론 만들기] Gazebo 사용하기에서 이어서 설명한다.
픽스호크 사이트는 들어갈 때마다 달라져있다.
가장 큰 원인은 내가 너무 느릿느릿 드론을 만들고 있기 때문이겠지만 이전에 시뮬레이터를 설치할 때와는 방법이 많이 달라져있다.
이렇게 느릿느릿 드론을 만들다가는 계속 새로운, 바뀐 내용을 학습하다가 끝날 것 같다.
'만들기 > 드론' 카테고리의 다른 글
| [드론 만들기] jMAVSim 사용하기 2/2 (0) | 2021.04.05 |
|---|---|
| [드론 만들기] jMAVSim 사용하기 1/2 (0) | 2021.04.03 |
| [드론 만들기] 드론 비행 시뮬레이터(Simulator) (1) | 2021.03.23 |
| [드론 만들기] Ubuntu(우분투) 주요 디렉토리 (2) | 2021.02.21 |
| [드론 만들기] Pixhawk와 Emax ESC(변속기) 호환문제 해결방법 (0) | 2021.02.21 |





댓글 영역