고정 헤더 영역
상세 컨텐츠
본문
이전 글...
드론 만들기
하드웨어
드론 만들기 - QGroundControl에서 Pixhawk 4 펌웨어 설치
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 1/2
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 2/2
드론 만들기 - Power Management Board
소프트웨어
드론 만들기 - MissionPlanner와 QGroundControl
드론 만들기 - QGroundControl에서 Pixhawk 4 펌웨어 설치
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 1/2
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 2/2
조립
드론 만들기 - GPS, Telemetry Pixhawk 4에 연결하기
비행
드론 만들기 - 쿼드콥터(Quadcopter) 비행 원리
기타
드론 만들기 - VMware Workstation Pro 설치하기
드론 만들기 - VMware Workstation Player에 Virtaul Machine 만들기
드론 만들기 - VMware Workstation Player에 Ubuntu 설치하기
완전 초짜의 드론 만들기 도전! 도전! 도전~!입니다.
맨땅에 헤딩~
인터넷 검색, 관련 사이트를 참고하여 Pixhawk 4를 이용한 중/소형 드론을 만들려고 하고 있습니다.
참고만 하세요~!
QGroundControl에서 기체, 센서 설정(드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 1/2)에 이어서 전원 설정을 시작한다.
QGroundControl에서 PX4의 전원을 설정하려면 배터리와 기체(드론) 사이의 배터리 전압과 전류를 측정할 수 있는 파워 분배기(Power Distribution Board)를 사용해야 만한다.

픽스호크 구매 시 동봉되어있는 Power Management Board를 사용한다면 아무런 문제없지만 그 외 다른 파워 분배기를 사용할 경우에는 위의 조건을 고려해서 파워 분배기를 구매해야 한다.
드론의 전원으로 사용하는 리튬 폴리머 배터리의 경우 과충전 시에도 배터리에 손상이 가지만 배터리 전압이 너무 낮을 경우에도 배터리에 손상이 발생한다. 물론 배터리 전압이 너무 낮을 경우 모터에 충분한 회전력을 제공하지 못해서 드론이 추락할 수도 있다.
따라서 전원 설정에서 가장 중요한 것도 남아있는 배터리 용량을 정확하게 제공하는 것이다.
PX4는 남아있는 배터리 용량을 측정하는데 3 가지 방법을 제공하고 있다.
그중 첫 번째 방법은 Basic Battery Settings(기본 배터리 설정)으로 파라미터를 변경하지 않을 경우 Basic Battery Settings이 배터리 용량을 측정하는 기본 설정 값이다.
이 방법은 측정한 전압을 전체 전압(full voltage)과 방전 전압(empty voltage) 사이 범위 값과 비교해서 남아있는 배터리 용량을 계산하는 단순한 방법이다.
기체(드론)에 가해지는 부하(load)에 따라서 측정된 전압(용량)이 변화할 수 있기 때문에 이 방법으로 계산한 남은 배터리 용량은 정확하지 않다.
두 번째 방법은 Voltage-based Estimation with Load Compensation(부하 보정을 통한 전압 기반 측정)이다.
이 방법은 Basic Battery Settings에서 정확성을 떨어뜨렸던 부하 효과를 보정한 측정방법이다. 따라서 남아있는 배터리 용량 추정하기 위해 사용되는 전압은 더 안정적이어서 비행 하강/상승 시 변화량도 작다.
PX4는 Voltage-based Estimation with Load Compensation에서 두 가지 부하 보정 방법을 지원한다.
- Current-based Load Compensation (권장).
- Thrust-based Load Compensation.
Current-based Load Compensation은 전류를 측정해서 부하 크기를 결정하는데 Thrust-based Load Compensation보다 더 정확하지만 전류 측정 센서가 있어야 한다.
이 방법을 사용하려면 BAT_R_INTERNAL 파라미터에 배터리 내부 저항값을 입력한 후 기본 설정 화면에서 Ampers per volt divider을 다시 계산하면 된다.
일반적인 리튬 폴리머 배터리 팩의 내부저항은 셀 당 5mΩ이지만 배터리 셀의 노화, 방전율, 셀 상태에 따라서 다르다.
기본 설정으로 BAT_R_INTERNAL는 -1로 설정되어 이 방법은 해제된 상태이다.
(위에서 언급했든 전원 기본 설정은 Basic Battery Settings이다.)
Thrust-based Load Compensation은 모터에 명령되는 총추력을 기초로 부하 크기를 측정한다.
추력 명령과 전류 사이의 시간 지연과 이 두 값이 선형적으로 비례하지 않기 때문에 Current-based Load Compensation보다 정확도가 낮다. 따라서 기체가 전류센서를 가지고 있다면 Current-based Load Compensation을 사용하는 것을 권고한다.
이 방법을 사용하려면 BAT_V_LOAD_DROP 파라미터에 100% 스로틀에서 셀 당 하락 전압 크기를 입력하면 된다.
세 번째 방법은 Voltage-based Estimation Fused with Current Integration이다.
상대적인 배터리 소모량을 측정하는 가장 정확한 방법으로 매번 부팅 때마다 정상적으로 재충전된 배터리를 정확하게 설정하면 스마트 배터리의 측정 품질과 비슷하며 이론적으로는 정확하게 남은 비행시간 추정이 가능하다.
이 방법은 사용 가능한 용량에 대한 전압 기반 측정을 소비된 충전 전류의 전류 기반 측정을 융합해서 남은 배터리 용량을 평가하므로 정확하게 전류를 측정할 수 있는 하드웨어가 있어야 한다.
이 방법을 사용하려면 먼저 Current-based Load Compensation을 사용해서 정확한 전압 측정을 설정 후 Amps per divider을 계산한다.
그 후 BAT_CAPACITY 파라미터를 배터리 라벨에 표기되어있는 배터리 용량의 약 90%를 입력하면 된다.
이제부터 전원 설정을 시작한다.
QGroundControl을 실행시킨 후 픽스호크를 연결하고 상단의 기어 아이콘을 선택한 후 사이드 바의 전원을 선택한다.

셀 수는 직렬로 연결된 배터리 팩의 셀 수를 말하는데 일반적으로 배터리 수는 'S'로 표기된다. 예) 2S, 3S
전체 전압(Full Voltage)은 각 셀의 최대 공칭전압으로 셀이 "전체 전압"으로 간주되는 가장 낮은 전압을 의미한다.
이 값은 배터리의 최대 공칭 셀 전압(Lipo는 4.2v)보다 약간 낮게 설정되어야 하지만, 너무 낮게 설정해서 비행을 몇 분 한 후에도 측정된 배터리 용량이 여전히 100% 일 정도로 낮게 설정해서는 안 된다.
기본 값을 4.05V로 설정되어있는데 리튬 폴리머 배터리 팩(Lipo)에 적합 값이다.
이 기본 값을 변경하고 싶으면 설정 화면에서 직접 변경하거나, 파라미터 > Battery Calibration > BAT_V_CHARGED에서 변경하면 된다.
방전 전압(Empty Voltage)은 셀당 최소로 안전한 공칭 전압으로 이 전압 이하일 경우 배터리에 손상이 발생할 수 있다.
방전 전압에 적합한 일정한 값은 없다.
만약 이 값이 너무 낮을 경우 배터리에 손상이 가할 수 있고 또한 드론이 추락할 수도 있고 이 값이 너무 높을 경우에는 불필요하게 비행시간이 단축될 수도 있다.
기본 값으로 3.50V가 설정되어있다.
리튬 폴리머 배터리 팩의 경험 법칙에 따르면 부하 없을 경우 3.7V가 보수적인 최솟값이고, 3.2V 일 경우 배터리에 손상을 가할 수 있다. 부하가 있을 경우는 3.5V(비행 중)로 실제 최솟값과 가까운데 이 전압만큼 하락할 경우 드론은 즉시 착륙을 해야 한다.
배터리의 수명과 성능을 고려한다면 3.7V 아래로 배터리 용량이 떨어지면 즉시 충전하는 것이 좋다.
부하 보정을 사용하기 위해서는 방전 전압은 보정이 없는 경우보다 더 높아야 하는데 그 이유는 보정된 전압이 추정치로 사용되기 때문이다.
방전 전압의 기본 값을 변경하고 싶으면 설정 화면에서 직접 변경하거나, 파라미터 > Battery Calibration > BAT_V_EMPTY에서 변경하면 된다.
셀 수 입력은 파라미터 > Battery Calibration > BAT_N_CELLS에서 변경할 수도 있고 설정 화면에 직접 입력할 수 있다.
설정 화면에서 변경하려면 셀의 수 옆 0이 적힌 부분을 클릭(1)을 클릭하고 칸의 끝단에 나타나는'?'을 클릭한 후 나타나는 오른쪽 창에서 사용할 리튬 폴리머 배터리 팩의 셀 수를 입력(2)하고 확인(3)을 클릭하면 셀 수 설정이 완료된다.

변경된 배터리 셀을 픽스호크에 적용하려면 시스템을 재부팅해주어야 한다는 메시지가 뜨면 x를 누른 후 재부팅을 하거나 아니면 설정이 끝난 후 재부팅을 해도 된다.
배터리 정보에 전압 분배기 값과 볼트 당 암페어 값이 주워져 있다면 바로 입력해도 된다.
제공된 정보가 없다면 QGC에서 픽스호크 4에 파워 분배기와 배터리를 연결해서 전압 분배기 값과 볼트 당 암페어 값을 계산할 수 있다.
먼저 배터리를 파워 분배기에 연결하고 파워 분배기를 6핀 케이블로 픽스호크에 연결한다.
(아래 그림은 픽스호크 4에 동봉된 파워 분배기인 Power Management Board를 연결한 것이다)

기본값으로 전압 분배기 값과 볼트 당 암페어 값이 계산되어 표기된다.
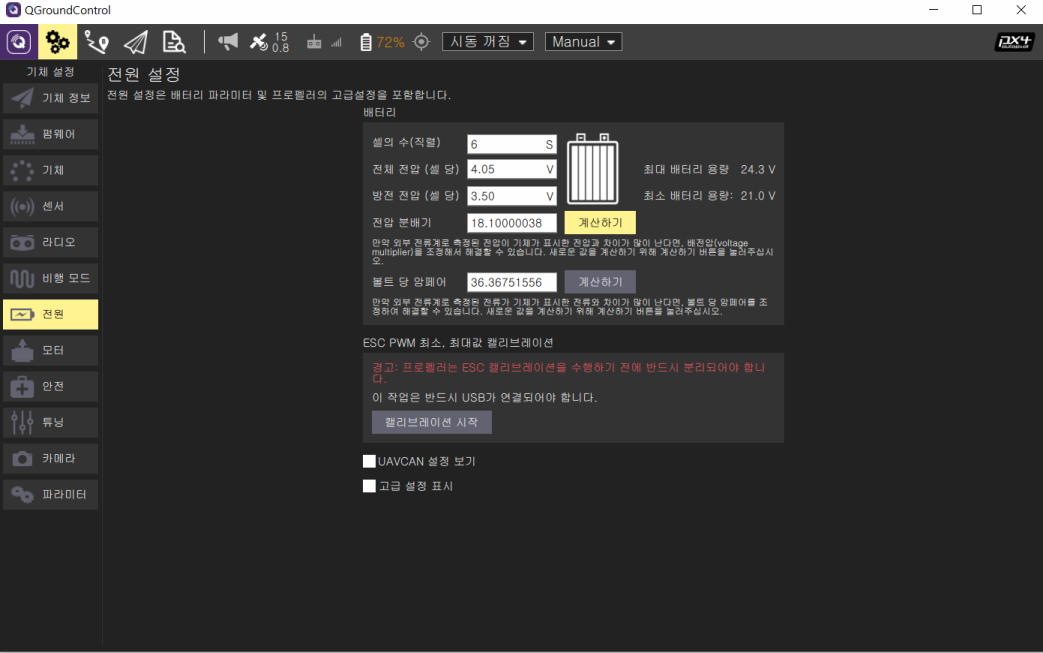
만약 파워 분배기로 픽스호크 4에 동봉된 Power Management Board를 사용할 경우에는 따로 전압 분배기 값을 계산할 필요 없이 그대로 두면 된다.
하지만 그렇지 않을 경우에는 전압 분배기를 다시 계산해주어야 한다.
전압 분배기를 다시 계산하기 위해서 먼저 멀티미터기(multimeter) 측정 단자를 배터리 전압의 +, - 단자에 물린 후 전압을 측정한 후, 전원 설정 화면에서 전압 분배기 옆 계산하기(1)를 선택한다.

멀티미터기로 측정한 배터리 전압을 측정 전압(2)에 입력한 후 calculate(3)을 클릭하면 전압 분배기가 새로 계산된다. 이 결과를 저장하려면 확인(4)을 눌러서 저장한다.
전압 분배기 설정 파라미터는 BAT_V_DIV로 파라미터 > Battery Calibration > BAT_V_DIV에서 직접 변경할 수도 있다.
볼트 당 암페어(Amps per Volt)도 전압 분배기 설정처럼 직접 측정한 전류 값을 입력해서 다시 계산하면 된다.
그러나 볼트 당 암페어(Amps per Volt)의 값은 부하 보정을 하지 않는 basic configuration을 사용할 경우 필요하지 않고 Current-based Load Compensation 또는 Current Integration을 사용할 경우에는 계산이 필요하다.
우선 기초적인 basic configuration을 사용할 예정이므로 볼트 당 암페어(Amps per Volt) 설정은 그대로 둔다.
배터리의 전류를 멀티미터기로 직접 측정하려면 배터리 양단 사이에 적당한 부하(load)를 연결한 후 측정해야 한다. 아무 생각없이 멀티미터 측정 단자를 배터리 양 단자에 연결할 경우 강한 스파크를 목격하게 될 뿐만 아니라 최악의 경우 구매한 배터리를 더 이상 사용할 수가 없게 될 수도 있다.
멀티미터기가 전류 측정으로 설정되어 있는 경우, 절대 배터리 양단 사이에 멀티미터기 측정 단자를 연결해서는 안 된다!!
다른 몇몇 파워 분배기에는 따로 배터리 전류를 측정할 수 있는 단자가 제공된다는데 픽스호크에서 제공하는 Power Management Board는 설명서를 읽어봐도 그런 내용이 없다.
또 전압 분배기의 경우, 특별한 설정없이 그대로 사용해도 된다는 설명이 픽스호크 홈페이지에 있지만 볼트 당 암페어의 경우에도 그럴 수 있는지에 대한 정보는 찾을 수가 없다.
볼트 당 암페어 설정 파라미터는 BAT_A_PER_V로 파라미터 > Battery Calibration > BAT_A_PER_V에서 직접 변경할 수도 있다.
참고로 QGroudControl 화면에서 배터리 아이콘을 클릭하면 배터리 상태를 보여준다.

고급설정 표시를 선택해서 셀 당 최대부하 시 전압강하를 설정할 수 있는데 필요시 사용한다.

변속기 설정은 일단 남겨두고 좌측의 안전 아이콘을 클릭해서 안전과 관련한 장치를 설정을 한다.
이러한 안전장치 설정을 통해서 안전한 비행을 할 수 있는 특정한 영역과 조건 및 안전한 비행 및 착륙, 자세 유지, 특정 위치로 귀환 등의 특정 조치를 명시할 수 있다.
조종기를 사용할 경우 문제가 발생 시 안전 스위치(safety switches)로 즉시 모터를 정지하거나 드론을 귀환하도록 할 수 있다.

먼저 배터리 안전장치 트리거를 설정한다.
배터리가 용량에 따라서 경고, 안전장치, 비상 레벨로 나뉘는데 해당 칸을 클릭해서 직접 값을 변경할 수 있다.
설정한 레벨보다 배터리 용량이 낮을 경우 각 레벨에 따른 안전장치 동작은 경고, 귀환, 즉시 착륙이다.
기본 설정 그대로 두고 다음 단계로 넘어간다.
Object Detection 설정은 기본 구성으로는 사용할 없으므로 해제(disable)된 상태인데 변경 없이 그대로 둔다.
RC 연결 안전장치 트리거 설정은 조종기를 사용하지 않을 예정이므로 해제(disable)로 설정한다.
조종기를 사용할 경우 기본 설정 그대로 두고 다음 단계로 넘어간다.
데이터링크 안전장치 트리거는 텔레메트리 통신과 관련이 있다.
텔레메트리를 사용할 경우 안전장치 동작과 데이터 링크 시간 초과를 결정해야 한다.
안전장치 동작은 일정 시간 동안 텔레메트리 통신이 끊어질 경우 드론이 귀환하도록 설정한다.
(필요에 따라 착륙 등을 선택하면 된다)

데이터 링크 시간 초과의 경우 기본 설정 그대로 두고 추후 필요시 변경한다.

경계선(면) 안전장치 트리거는 home position에서 가상의 실린더를 만드는 것이다. 만약 드론이 이 가상의 실린더의 밖이나 또는 실린더 높이보다 더 높이 비행할 경우 안전장치 동작을 실행한다.
Geofence를 사용할 경우 안전장치 동작과 최대 지름과 최대 고도를 설정하고 그렇지 않을 경우 그대로 둔다.
다음으로 Return To Launch Settings을 설정한다.
이륙 점으로 귀환 시 비행 조건을 설정하는 것으로 비행 고도와 이륙점 도착 시 착륙 방법을 설정하는데 추후 필요시 설정을 변경하고 지금은 기본 설정 그대로 두고 다음 단계로 넘어간다.
착륙 모드 설정은 현재 위치에서 착륙 시 착륙 방법을 설정하는데 추후 필요시 설정을 변경하고 기본 설정 그대로 두고 다음 단계로 넘어간다.
기체 텔레메트리 로깅, Hardware in the Loop 시뮬레이션도 기본 설정 그대로 두고 안전 설정을 마무리한다.
카메라 설정에서 일단 카메라는 해제하고 추후 필요시 설정한다.
기체 설정에서 설정하지 않은 모터, 튜닝 등은 차후에 설정하기로 하고 기체 설정을 일단은 마무리한다.
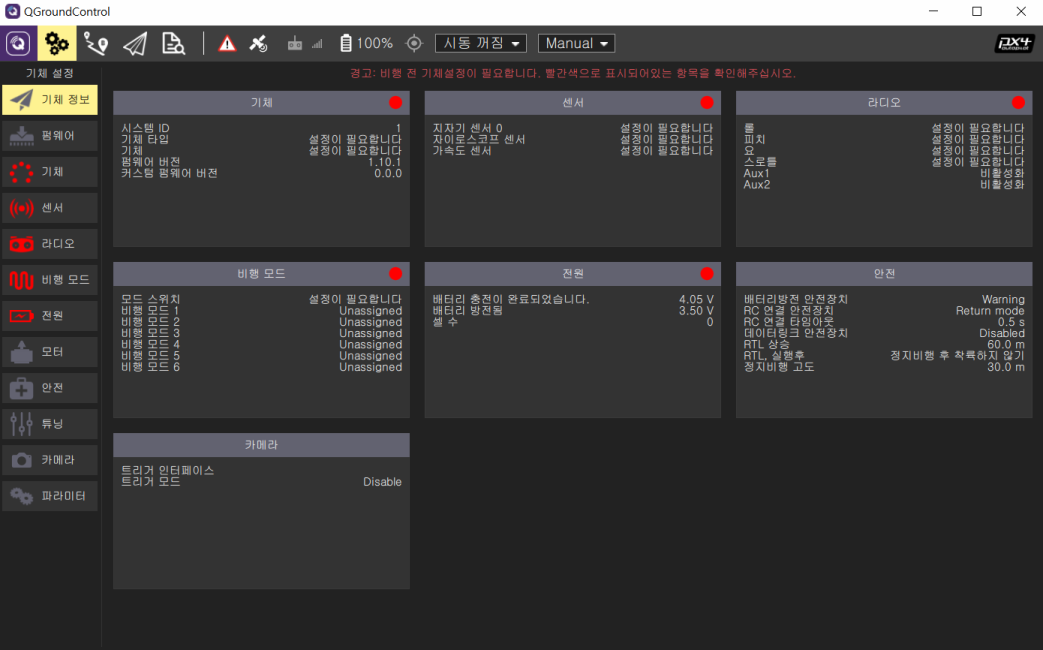
만약 픽스호크 설정 값을 초기화시키고 싶을 경우에는 파라미터 > 도구 > 펌웨어 기본값을 재설정을 클릭한다.

재시작을 클릭한다.

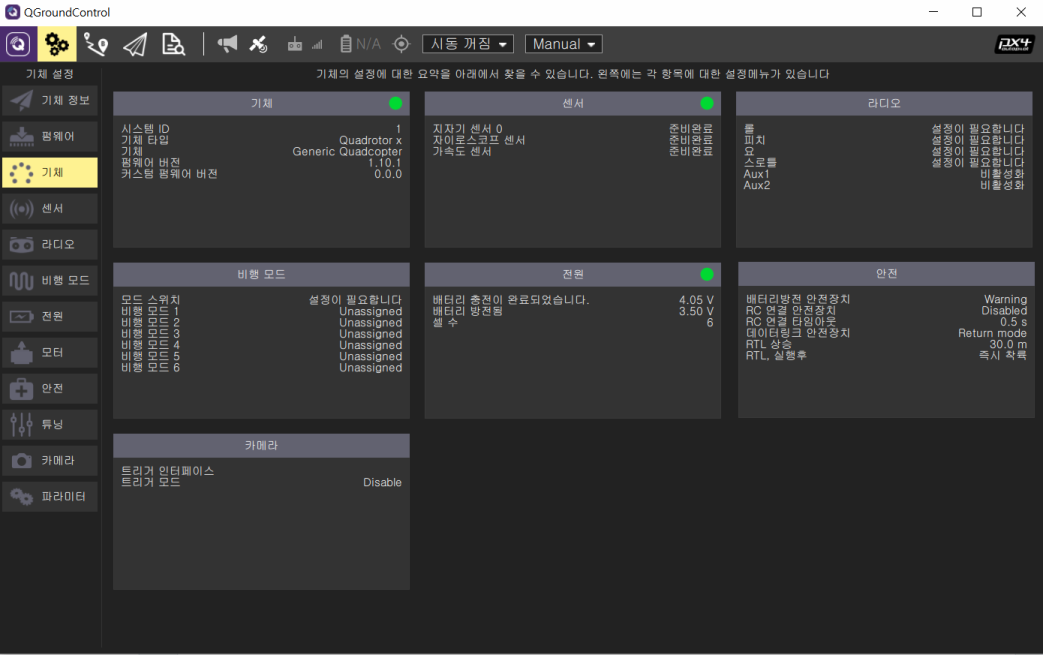
초기화가 완료되었다(붉은 동그라미는 해당 항목에 추가 설정이 필요하다는 의미이다).
이전 글...
드론 만들기
하드웨어
드론 만들기 - QGroundControl에서 Pixhawk 4 펌웨어 설치
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 1/2
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 2/2
드론 만들기 - Power Management Board
소프트웨어
드론 만들기 - MissionPlanner와 QGroundControl
드론 만들기 - QGroundControl에서 Pixhawk 4 펌웨어 설치
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 1/2
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 2/2
조립
드론 만들기 - GPS, Telemetry Pixhawk 4에 연결하기
비행
드론 만들기 - 쿼드콥터(Quadcopter) 비행 원리
기타
드론 만들기 - VMware Workstation Pro 설치하기
드론 만들기 - VMware Workstation Player에 Virtaul Machine 만들기
드론 만들기 - VMware Workstation Player에 Ubuntu 설치하기
'만들기 > 드론' 카테고리의 다른 글
| 드론 만들기 - 쿼드콥터(Quadcopter)의 비행원리 (0) | 2020.05.28 |
|---|---|
| 드론 만들기 - 멀티콥터(Multicopter) 종류 (0) | 2020.05.25 |
| [드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 1/2 (0) | 2020.05.21 |
| 드론 만들기 - VMware Workstation Player에 Ubuntu 설치하기 (0) | 2020.05.15 |
| 드론 만들기 - VMware Workstation Player에 Virtual Machine 만들기 (0) | 2020.05.14 |





댓글 영역