고정 헤더 영역
상세 컨텐츠
본문
이전 글...
드론 만들기
하드웨어
QGroundControl에서 변속기(ESC) 교정하기
Pixhawk 4의 Power Management Board
QGroundControl에서 Pixhawk 4 펌웨어 설치
QGroundControl에서 Pixhawk 4 설정하기 1/2
QGroundControl에서 Pixhawk 4 설정하기 2/2
파워 분배기(PDB, Power Distribution Board)
소프트웨어
MissionPlanner와 QGroundControl
QGroundControl에서 Pixhawk 4 펌웨어 설치
QGroundControl에서 Pixhawk 4 설정하기 1/2
QGroundControl에서 Pixhawk 4 설정하기 2/2
QGroundControl에서 Pixhawk 파라미터 변경하기
VMware Workstation Player에 Virtaul Machine 만들기
VMware Workstation Player에 Ubuntu 설치하기
조립
Power Management Board에 커넥터 연결하기
변속기(ESC)와 Power Management Board 연결하기
QGroundControl에서 변속기(ESC) 교정하기
GPS, Telemetry Pixhawk 4에 연결하기
통신
개발
비행
문제해결
Pixhawk와 Emax ESC(변속기) 호환문제 해결방법
기타
완전 초짜의 드론 만들기 도전! 도전! 도전~!입니다.
맨땅에 헤딩~
인터넷 검색, 관련 사이트를 참고하여 Pixhawk 4를 이용한 중/소형 드론을 만들려고 하고 있습니다.
참고만 하세요~!
Flight Controller(FC)로 Pixhawk 시리즈 중 한 종류를 구입했다면 이제는 FC에 펌웨어를 설치해야 하는데 펌웨어를 설치하려면 우선 Ground Control Station(GCS)을 먼저 설치해야 한다.
만약 Pixhawk의 펌웨어로 ArduPilot를 설치하고자 한다면 MissionPlanner를, PX4를 설치하고자 한다면 QGC을 설치를 권장한다. MissionPlanner에서는 ArduPilot만 설치 가능하지만, QGroundControl는 PX4 뿐만 아니라 ArduPilot 설치까지 지원한다.
QGC는 거의 대부분의 운영체계를 지원하지만 여기서는 윈도우, 우분투, 핸드폰/태블릿에 설치하는 방법에 대해서 알아본다.
그 외 Mac 등의 운영체계에 설치하고 싶을 경우에는 아래 사이트를 참조한다.
https://docs.qgroundcontrol.com/en/getting_started/download_and_install.html
QGC를 설치를 위한 컴퓨터의 최소 사양은 메모리 8GB 이상, SSD 하드디스크, Nvidia 또는 AMD 그래픽카드와 i5 이상의 CPU이다.
1. QGroundControl을 윈도우에 설치하기
QGC는 64비트 윈도우에서만 설치가 가능하고 32비트는 지원이 되지 않는다.
아래 주소를 클릭해서 우선 QGC를 다운로드한다.
https://s3-us-west-2.amazonaws.com/qgroundcontrol/latest/QGroundControl-installer.exe
다운로드가 완료되면 아이콘을 더블 클릭해서 아래의 그림 순서대로 설치하면 된다. 다른 프로그램을 설치하는 것과 다른 것이 없으며 설치 폴더를 변경하지 않을 경우에는 next만 계속 클릭하면 된다.
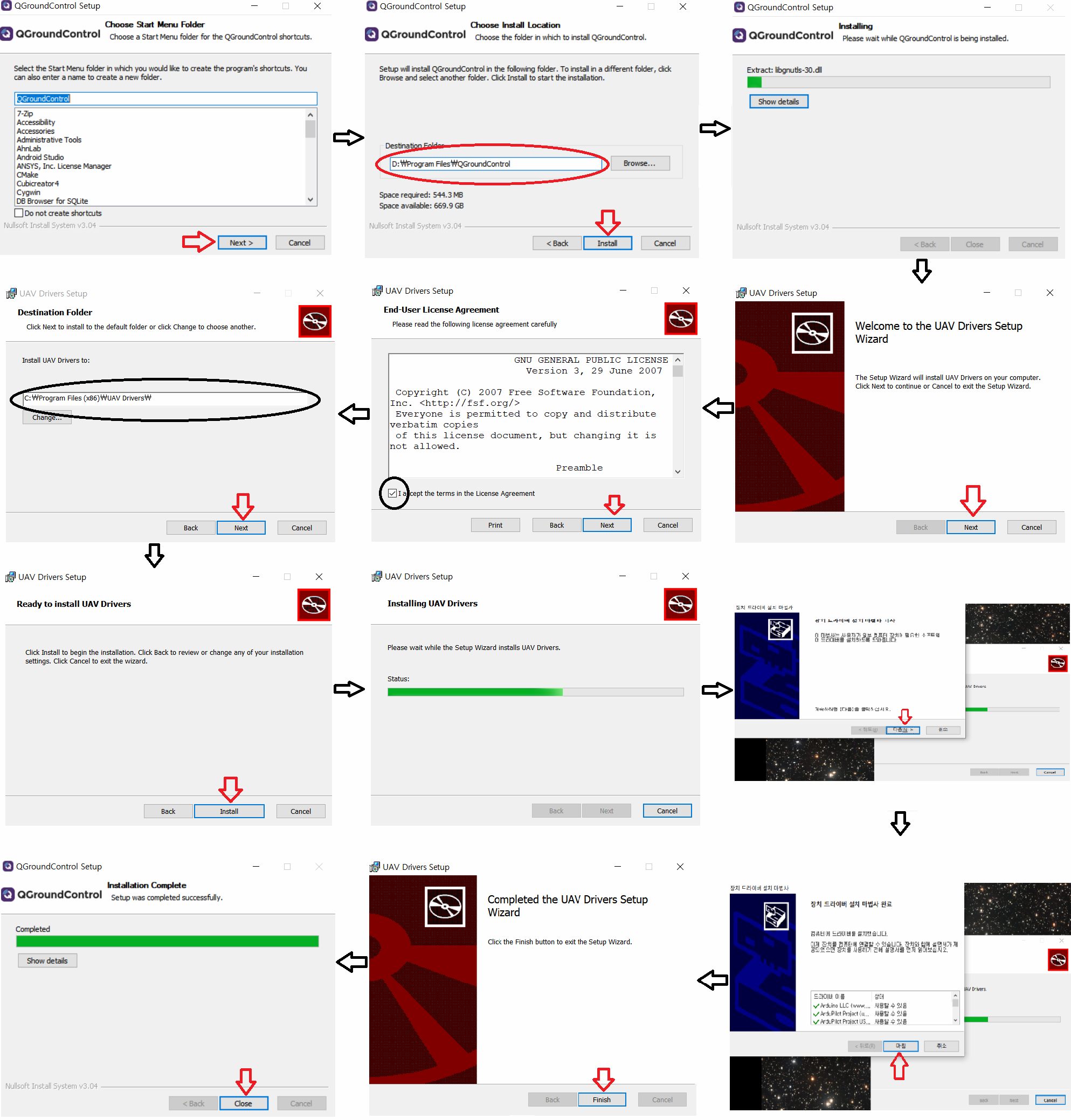
설치가 완료되면 아래의 그림처럼 QGroundControl, GPU Compatibility Mode, GPU Safe Mode 3 개의 단축키가 생성된다.

스타트업(Startup)과 비디오 렌더링(Video Rendering)에 문제가 없다면 QGroundControl 단축키를 사용한다. 종종 윈도우에서 사용자 인터페이스 렌더링이나 비디오 드라이버 충돌이 발생하는데 그 이유는 OpenGL 드라이버의 문제 때문인 것으로 추측하고 있다.
3개 단축키의 차이점은 다음과 같다.
QGroundControl: OpenGL 그래픽 드라이버를 바로 사용.
GPU Compatibility Mode: DirectX에서 실행되는 OpenGL인 ANGLE 드라이버를 사용.
GPU Safe Mode: 사용자 인터페이스 용 소프트웨어 레스터 라이저(rasterizer)를 사용, 속도 느림.
2. QGroundControl을 우분투에 설치하기
QGC는 Ubuntu LTS 18.04나 그 이후 버전에 설치할 수 있다.
QGC를 우분투에 설치하기 전에 우선 modem manager를 삭제해야 하고 시리얼 포트(serial port) 사용할 수 있도록 승인해야 한다.
비디오 스트리밍을 사용하려면 GStreamer도 설치해야 한다.
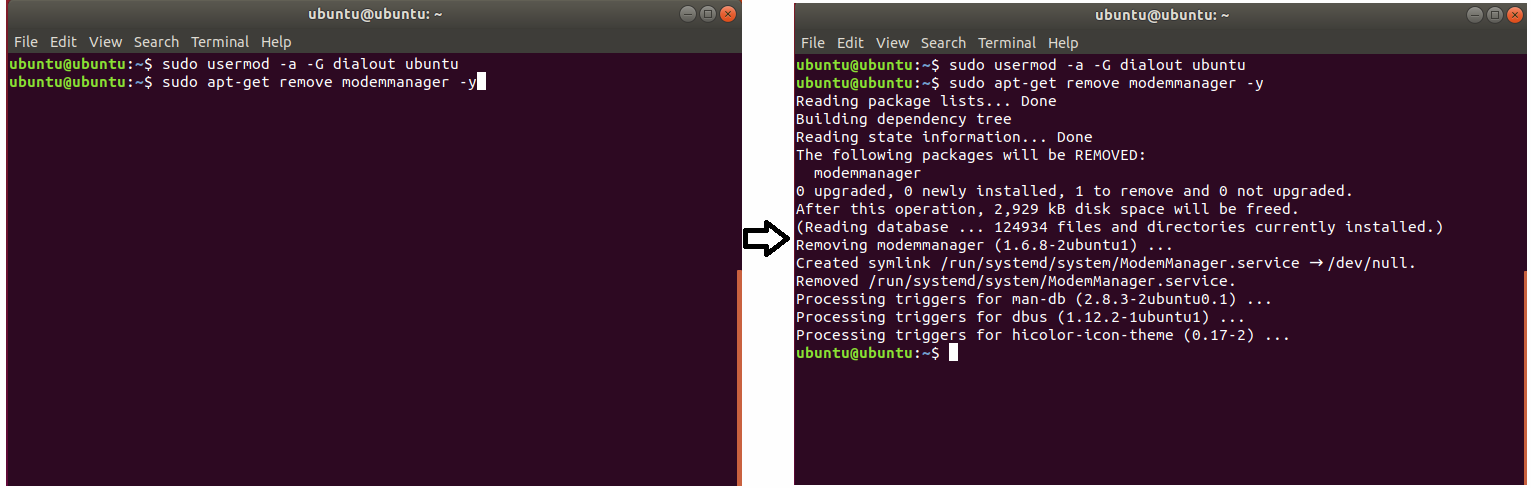
먼저 터미널에서 아래의 명령어를 터미널에 입력해서 시리얼 포트를 사용할 수 있도록 설정한다.
| sudo usermod -a -G dialout 사용자이름 |

그 후 아래와 같이 터미널에 아래의 명령어를 입력해서 modem manager를 삭제한다.
| sudo apt-get remove modemmanager -y |
비디오 스트리밍을 사용할 경우 GStreamer를 설치해야 하는데 아래의 명령어를 터미널에 입력해서 설치한다.
| sudo apt install gstreamer1.0-plugins-bad gstreamer1.0-libav -y |
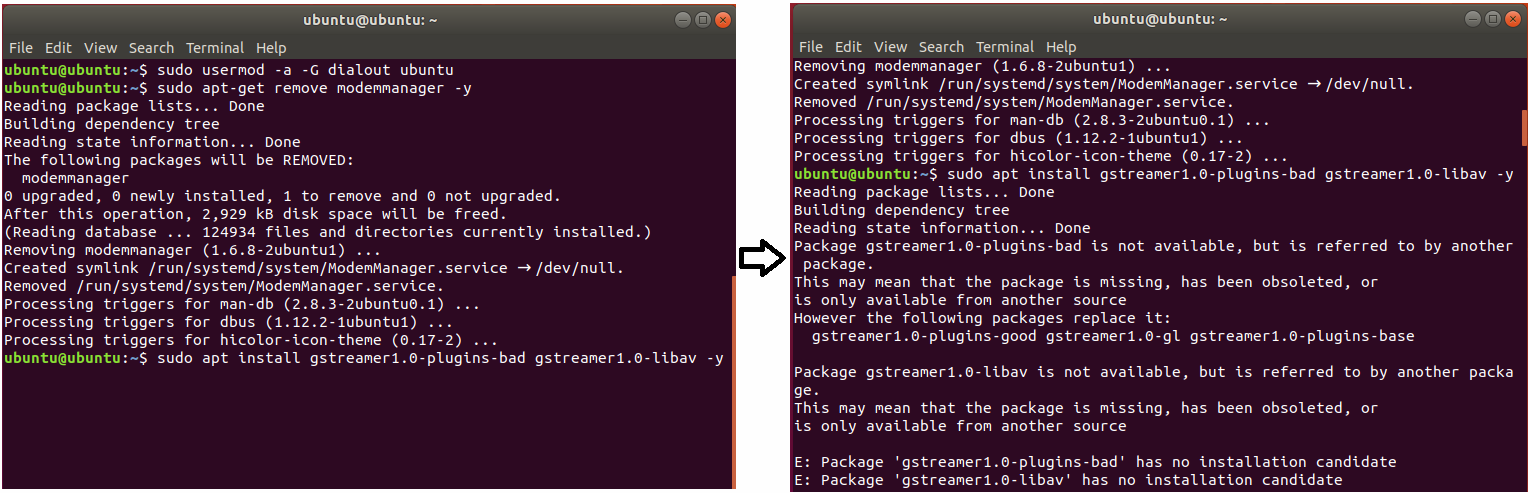
만약 우분투 설치 후에 업데이트를 하지 않았다면 위와 같은 에러가 발생할 수 있다. 이 경우 아래의 명령어를 터미널에 입력해서 우분투 업데이트한다.
| sudo apt-get update |

업데이트가 완료되면 터미널에 다시 명령어를 넣어 GStreamer을 설치한다.

Gstreamer 설치가 완료되면 변경사항이 적용되도록 로그아웃 후 다시 로그인한다.
다시 로그인한 후 아래의 링크를 클릭하거나 또는 QGC 홈페이지에서 QGroundControl을 다운로드한다.
다운로드: https://s3-us-west-2.amazonaws.com/qgroundcontrol/latest/QGroundControl.AppImage

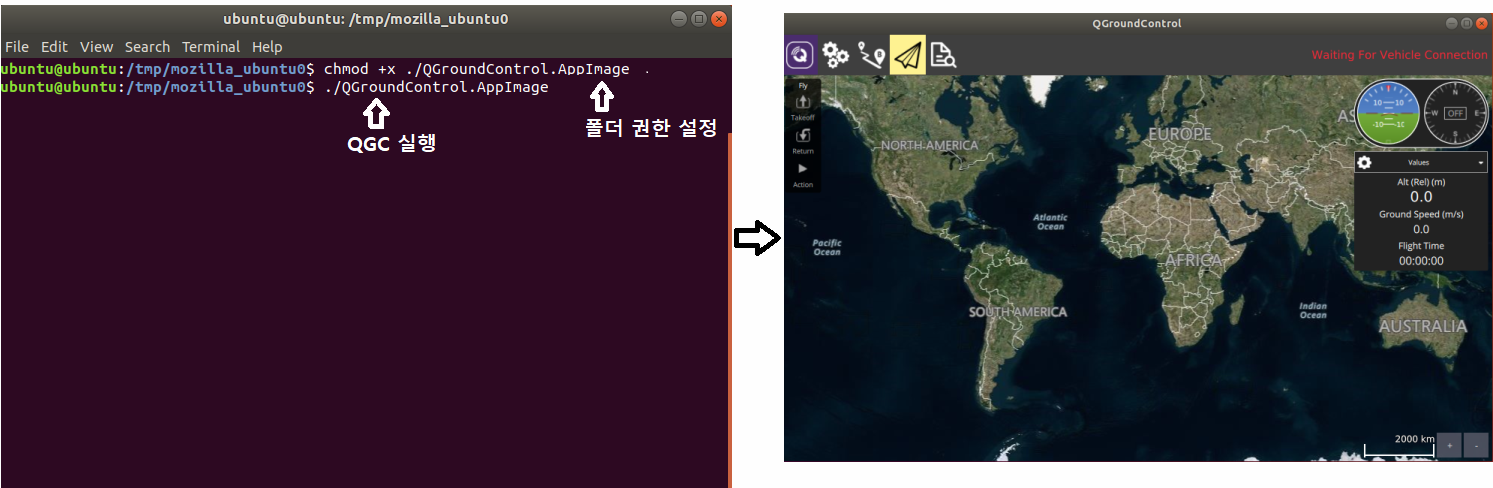
다운로드가 완료되면 새 터미널 창을 열어서 파일이 저장된 폴더로 이동한 후 아래의 명령어로 폴더에 권한을 준다.
(다운한 QGC를 원하는 폴더로 이동할 수도 있다)
| chmod+x ./QGroundControl.AppImage |
* chmod +x는 모든 사용자에게 실행 권한을 부여한다는 의미.
* chmod에 대한 상세한 의미는 [드론 만들기] Ubuntu 터미널 명령어에서 chmod와 ls - l 참조.
이어서 아래의 실행 명령어로 QGC를 실행한다.
| ./QGroundControl.AppImage |
매번 터미널을 열어서 QGC를 실행하는 것이 번거로울 경우 윈도우처럼 바탕하면에 단축 아이콘을 만들어서 더블 클릭으로 QGC를 실행할 수도 있다.
바탕화면에 단축 아이콘을 만드는 방법은 윈도우와 동일하게 복사 후 바탕화면에 붙이기를 하면 바탕화면에 아이콘이 생성된다.
QGC의 언어를 변경하고 싶을 경우 QGC 설정([드론 만들기] QGroundControl 사용방법 1/4 참조)의 언어 항목에서 사용하고자 하는 언어를 선택한 후 QGC를 재시작하면 선택한 언어로 변경된다.
(재시작을 하지 않으면 일부분만 변경된다)
3. QGroundControl을 핸드폰/태블릿에 설치하기

안드로이드 계열 핸드폰이나 태블릿일 경우 가장 손쉬운 방법은 구글 플래에 스토어에서 QGroundControl 앱을 다운해서 설치하는 것이다. 또는 아래의 주소로 직접 APK를 다운로드하여 구글의 보안설정을 해제한 후 설치할 수도 있다.
Android 32bit APK: https://qgroundcontrol.s3-us-west-2.amazonaws.com/latest/QGroundControl32.apk
Android 64bit APK: https://qgroundcontrol.s3-us-west-2.amazonaws.com/latest/QGroundControl64.apk
애플의 핸드폰/태블릿에 설치할 경우 애플의 앱 스토어에서 다운로드하여서 설치하면 된다.
태블릿이나 핸드폰에서 QGroundControl을 Ground Control Station으로 사용은 할 수 있지만 펌웨어 설치는 불가능하다.
'만들기 > 드론' 카테고리의 다른 글
| [드론 만들기] MissionPlanner와 QGroundControl (2) | 2020.04.15 |
|---|---|
| 드론 만들기 - Pixhawk 시리즈 (0) | 2020.04.15 |
| 드론 만들기 - 비행 시 주의사항 (0) | 2020.03.30 |
| 드론 만들기 - 프로펠러(Propeller) (0) | 2020.03.28 |
| [드론 만들기] 용어 (0) | 2020.03.28 |





댓글 영역