고정 헤더 영역
상세 컨텐츠
본문
이전 글...
드론 만들기
하드웨어
[드론 만들기] Pixhawk의 텔레메트리(Telemetry)
[드론 만들기] QGroundControl에서 Pixhawk 4 펌웨어 설치
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 1/2
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 2/2
[드론 만들기] Pixhawk 4의 Power Management Board
[드론 만들기] 파워 분배기(PDB, Power Distribution Board)
소프트웨어
[드론 만들기] MissionPlanner와 QGroundControl
[드론 만들기] QGroundControl 사용방법 1/3
[드론 만들기] QGroundControl 사용방법 2/3
[드론 만들기] QGroundControl에서 Pixhawk 4 펌웨어 설치
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 1/2
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 2/2
[드론 만들기] QGroundControl에서 Pixhawk 파라미터 변경하기
조립
[드론 만들기] Power Management Board에 커넥터 연결하기
[드론 만들기] GPS, Telemetry Pixhawk 4에 연결하기
비행
[드론 만들기] 쿼드콥터(Quadcopter) 비행 원리
기타
[드론 만들기] VMware Workstation Pro 설치하기
[드론 만들기] VMware Workstation Player에 Virtaul Machine 만들기
[드론 만들기] VMware Workstation Player에 Ubuntu 설치하기
완전 초짜의 드론 만들기 도전! 도전! 도전~!입니다.
맨땅에 헤딩~
인터넷 검색, 관련 사이트를 참고하여 Pixhawk 4(PX4)를 이용한 중/소형 쿼드콥터 드론을 만들려고 하고 있습니다.
참고만 하세요~!
모터의 속도를 제어하기 위해서 브러시리스 모터(brushless motor)에서는 변속기(ESC, Electric Speed Controller)가 꼭 필요하다는데....
변속기 ESC 보다 키보드의 ESC가 더 익숙한, 그 이전에는 별 관심 없던 ESC를 드론 한번 만들어보겠다고 여기저기 사이트를 돌아다니며 찾아봤다.
1. 변속기는 뭔가??

생긴 모양이 풍선껌에 전선이 달린 듯한 뜻밖의 모습이라... 좀 귀여운 느낌이 든다...
그런데, 만약에 이 귀여운 변속기 없이 전원(배터리)을 모터에 바로 연결하게 되면 어떻게 될까?
다른 전기적인 요소를 다 무시하고 모터만 생각해본다면, 브러시드 모터(brushed Motor) 일 경우 모터는 일정한 속도로만 회전할 것이다.
이 모터가 드론에 연결되어 있다면... 드론의 속도나 방향을 조절하는 것은 불가능할 것이다. 그러니까 우리가 기대하는 드론의 모습은 볼 수가 없을 것이다.
그렇다면 모터가 3상 브러시리스 모터(brushless motor)라면?
나 같은 초짜라면 배터리를 모터에 연결조차 할 수 없을 것이다. 분명 한 손에는 배터리 전선 2개를 들고 다른 한 손에는 모터의 전선 3개를 들고 멍한 표정을 짓고 있을 것이 분명하다.
만약 갖고 있는 모터가 2상 브러시리스 모터라면?
배터리와 모터의 검은색, 빨간색 전선을 색깔 맞춤해서 연결은 그나마 잘했다고 해도, 모터는 아예 회전하지 않을 수도 있다. 왜냐하면 브러시리스 모터는 회전자의 위치에 따라 공급되는 전원이 달라져야 하기 때문이다.

그러니까 변속기는 모터와 FC 사이, 모터와 배터리 사이의 중계자 역할을 한다.
다시 말하면, 사용자가 조정기로 드론의 위치나 속도를 변경하면 수신기를 통해 그 명령을 인식한 FC는 변속기로 명령을 보낸다. 그러면 변속기는 그 명령에 맞게 배터리의 전압을 조정하여 모터에 공급해서 모터의 회전 속도를 변경하는 중간 역할을 하기 때문이다.
2. 변속기 내부 구조는?
드론 만들기 - 모터에서 설명한 것처럼 직류모터의 회전 속도는 인가되는 전압과 선형적인 관계를 가진다.
쉽게 말하면, 전압이 증가하는 만큼 회전 속도도 증가하는데, 그런 특성 때문에 모터의 속도조절이 매우 쉽다. 이러한 이유로 드론에서는 거의 대부분 직류 모터, 특히 내구성을 높인 브러시리스 모터(brushless motor, BLDC motor - brushLess direct current)를 사용한다.

위의 그림은 변속기의 내부 구성도를 간략하게 그려 놓은 것이다.
변속기의 주요 부품은 프로세서, BEC - 레귤레이터, 반도체 스위칭 소자 구동 회로, 스위칭 반도체 소자, 회전자 위치 전기회로, 캐패시터이다.
3. 변속기 프로세서에는 어떤 것이 있나?
프로세서는 데이터를 산술적, 논리적으로 연산하는 중앙처리 장치를 말하는데, 흔히 컴퓨터를 구입할 때 인텔 코어 어쩌고 저쩌고, AMD 애슬론 어쩌고 저쩌고 하는 것도 프로세서이다.
변속기의 프로세서는 컴퓨터의 프로세서처럼 복잡한 기능을 수행하는 것은 아니다. 가장 주요한 기능은 FC에서 보내온 신호와 회전자 위치 전기회로에서 감지한 회전자의 위치를 기반으로 반도체 스위칭 소자 구동 전기회로를 조정하는 것이다.
드론의 변속기에 주로 사용되는 프로세서는 ATMEL, Silabs, BusyBee, ARM Cortex 등이 있다.
컴퓨터에 윈도나 리눅스를 설치하는 것처럼, 변속기 프로세서에도 펌웨어를 설치하는데, 프로세서마다 설치하는 펌웨어가 다를 수 있다. 실제 거의 대부분의 변속기에는 사전에 펌웨어가 설치되어 있으므로 구매자가 따로 고민하거나 설정할 것은 없다.
변속기의 펌웨어의 주요 목적은 변속기의 모터 제어 능력과 FC와의 통신성능을 향상하는 것이다.
4. 변속기 펌웨어에는 어떤 것이 있나?
드론 변속기의 펌웨어에서 사용하는 가장 오래된 오픈 소스(open source)는 Simok와 BLHeli이다.
Simonk와 BLHeli 외에도 클로즈드 소스(closed source)로 개별 펌웨어를 설치한 KiKiss ESC, Castle QuadPack, Gemfan Maverick ESC가 있다.
가장 많이 사용하는 펌웨어는 BLHeli 이인데 그 이유는 사용이 편리하기 때문이다. BLHeli의 또 다른 장점은 신호가 빠르다는 것이다. FC의 펌웨어가 발전함에 따라 호환성을 향상하기 위해서 BLHeli도 지속적으로 업데이트되어왔다. 버전 순서는 BLHeli->BLHeli_S->BLHeli_32이다.
가장 최근 버전은 BLHeli_32는 32비트 변속기와만 호화하는데, 이전 제품에 비해 더 부드럽고 안정적이고 정확하게 동작한다.
Simonk는 업데이트와 지원이 잘 되지 않을뿐더러 비전문가가 사용하기에는 어려운 점이 많다.
프로세서 별 지원 펌웨어는 다음과 같다.
ATMEL (8 bit) -> SimonK, BLHeli
SILABS (8 bit) -> , BLHeli, BLHeli_S
ARM Cortex (32 bit) -> BLHeli_32
요즘은 SILABS를 많이 사용하는데, 이전에는 대부분 ATMEL 8 비트를 사용했다. 32 비트 펌웨어가 특성 측면에서는 더 낫지만 여전히 8 비트 펌웨어를 사용하는 것은 가격, 지원 가능한 프로토콜 등 때문이다.
몇몇 변속기는 펌웨어 업그레이드 기능을 제공하는 것도 있다. 구매 시 판매 사이트에 적혀 있는 설명을 통해서 확인하면 된다.
5. 변속기 프로토콜에는 어떤 것이 있나?
프로토콜(protocol)이란 컴퓨터 간 사이에 정보를 주고받는 통신방법에 대한 규칙과 약속을 말하는데, 드론에서는 수신기를 통해 FC에서 수신한 명령을 변속기에 보내는 통신방법에 대한 규칙과 약속을 말한다.
변속기의 프로토콜은 얼마나 빨리 신호를 보내는가에 따라 결정된다. 2015년 이전에는 변속기 프로토콜로 Standard PWM만 사용했지만, 하드웨어의 성능이 향상되면서 드론의 변속기도 업그레이드되어 더 빠른 프로토콜을 사용할 수 있어졌다. 따라서 프로토콜에 따라 PWM이 아닌 다른 신호를 사용하기도 하고, 몇몇 프로토콜은 아날로그 신호가 아니라 디지털 신호를 사용하기도 한다.
현재 변속기에 사용되고 있는 프로토콜은 다음과 같이 다양하다.
Standard PWM (1000us – 2000us)
Oneshot125 (125us – 250us)
Oneshot 42 (42us – 84us)
Multishot (5us – 25us)
Dshot
Dshot150 (106.8us)
Dshot300 (53.4us)
Dshot600 (26.7us)
DShot1200 (13.4us)
ProShot
Oneshot125, Oneshot42, Multishot 프로토콜은 Standard PWM과 비슷하게 아날로그 신호이지만 더 빠르며, 파형이 흐트러지는 걸 줄이고, 조정기의 스틱과 드론의 반작용 사이의 지연을 감소한다. 성능을 향상하기 위해서 PID 루프(제어회로)와 동기화되어 있다.
DShot 프로토콜은 디지털 신호를 사용하는 가장 최신 변속기 프로토콜이다. 안정성, 성능, 모터의 회전 속도뿐만 아니라 변속기의 특정 명령을 송신하는 기능이 있다.
디지털 신호를 사용하기 때문에 PWM이나 OneShot와 비교해서 동작속도가 빠르고, 높은 해상도, 검사합계(checksum)을 통한 견고성 더 높고, 발진 진동(oscillator drift)이 감소한다.
또한 디지털 엔코딩을 사용하기 때문에 따로 변속기(ESC)를 교정할 필요도 없으면 명령어로 간단하게 모터의 회전 방향을 변경할 수 있어 편리하다.
2017년 중반 후 출시된 하드웨어는 모든 변속기 프로토콜을 지원하지만, DShot1200은 32비트 변속기에만 호환된다.
드론에 사용되는 변속기는 가격적인 측면 때문에 프로토콜로 Standard PWM(50Hz)를 많이 사용한다. 여기서 PMW이란 pulse width modulation의 약자로 펄스(pulse) 폭 변조라는 뜻이고, 변조란 파동 형태의 정보 신호를 송/수신하기 위해서 신호의 진폭, 주파수, 위상 등이 변경된 신호를 얻는 방법이다.
6. standard PWM 변속기의 동작원리는?
PWM은 일정한 주기 비율로 high(또는 on)와 low(또는 off)를 출력하여 사각 파형을 만들어낸다.
standard PWM 프로토콜의 경우 모터의 회전 속도는 펄스의 너비로 조절한다. 이때 프로토콜의 주파수는 50Hz이므로 펄스의 주기(T)는 20ms가 된다(Hz = 1/s).

브러시리스 모터의 경우에는 펄스의 너비에 따라 모터의 회전 속도가 달라진다. 위의 그림에서 보는 것처럼 PWM의 펄스 너비가 1ms 일 경우, 모터에 인가되는 전압 U, V, W의 주기가 느려져 모터는 최소 RPM으로 회전한다. 펄스의 너비가 2ms 일 경우 전압 주기가 빨라져서 최대 RPM으로 모터가 회전하게 된다.
(RPM - revolatuion per minute, 분당 회전수)
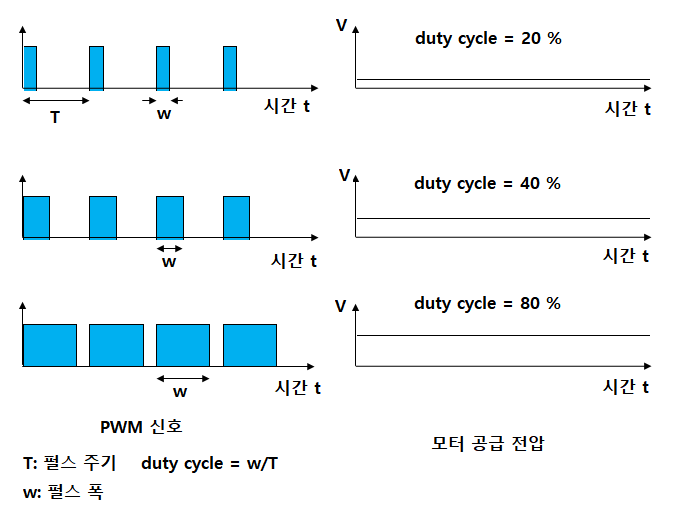
브러시드 모터의 경우에도 동작 원리는 비슷하다. 즉, 펄스폭의 크기에 따라서 모터의 회전 속도가 달라지지만 그 기준은 브러시리스 모터와는 좀 다르다.
브러시드 모터는 duty cycle의 크기에 따라 모터에 인가되는 공급 전압이 달라진다. 즉 duty cycle이 증가할수록 모터에 공급되는 전압의 크기 역시 커지고, 모터의 회전 속도가 빨라진다.
7. BEC-레귤레이터?
변속기의 또 다른 주요 부품은 BEC - 레귤레이터이다.

BEC는 battery eliminator cirucit의 약어로 배터리의 고전압을 5V로 저전압으로 떨어뜨려는 일종의 전압 조정기다. 5V는 저전압 장치인 FC, 수신기 등에 전원을 공급한다. 일반적으로 BEC의 출력 전류는 1~3A로 제품마다 차이가 있다.
BEC가 변속기에 기판에 함께 설치되어 있는 것이 아니라, 변속기 외부에 설치되어 있는 BEC를 UBEC(universal BEC 또는 ultimate BEC)라고 한다. 즉 변속기와 함께 묶여있지만 변속기와는 관련이 없고, 변속기와 분리되어 단독으로 BEC의 기능만 제공한다.
따라서 UBEC는 변속기처럼 배터리를 입력 전압으로 받아서 5 V 전압을 공급기 때문에 변속기의 연결단자가 달라지는 것은 없다.
거의 대부분 BEC는 리니어 타입(linear type, LBEC), UBEC는 스위칭 타입(switching type, SBEC)이다.
리니어 타입은 배터리의 고전압을 저전압 5V로 변환할 때 잉여 전압을 그대로 열로 방출한다. 만약 입력 전압이 높으면 높을수록 잉여 전압은 커지고, 그 만큼 높은 잉여 전압이 열로 방출된다. 이 방법은 에너지 낭비일 뿐만 아니라 변속기 전체를 뜨겁게 만들어서, 때로는 변속기를 태우기도 한다. 때로는 BEC가 과열되어 FC, 수신기 등에 전원이 공급되지 않아 드론이 추락할 수 도 있다.
따라서 높은 전압을 입력 전압으로 사용하는 드론에는 적합하지 않다. 보통 리튬 배터리 팩 3s 나 그 이하까지만 적절하다.
만약 용량이 큰 배터리를 사용하면서도 리니어 타입의 BEC가 있는 변속기를 사용하고자 할 때는 변속기에 히트 싱크를 부착하던지, 아니면 공기가 잘 통하는 곳에 변속기를 설치해야 한다.
리니어 타입은 잉여 전압을 그대로 열로 방출해서 버리기 때문에 효율이 50% 이하로 낮다. 하지만 고전압을 저전압으로 선형적으로 변환하기 때문에 출력 전압이 일정하고 전파 방해를 만들지 않는다는 장점도 있다.
스위칭 타입은 초당 수천번 전원을 스위칭하면서 출력 전압을 감소시킨다. 따라서 리니어 타입만큼 열이 발생하지는 않아서 높은 전압이나 전류를 다루기가 쉽고 입력과 출력의 차이가 큰 경우에도 약 85%의 높은 효율을 지속적으로 유지한다. 배터리 팩의 셀 수가 4s 이상일 경우에도 적용 가능하다.
단점은 출력 전압에 리플이 있고, 또 전압 하강을 위한 스위칭으로 노이즈가 발생해서 전파 방해를 일으킬 수 있다. 이런 이유로 드론 변속기에 잘 사용하지 않는다. 일부 경우 LC 필터를 설치해서 노이즈를 줄이기 위해서 설치하기도 한다.
변속기 중 BEC가 없는 변속기가 있는데 이런 변속기는 변속기가 opto-isolator을 사용하지 않아도 Opto 변속기(optp ESC)라고 부른다. opto는 opto isolator의 약자이다.
opto isolator는 광복합 소자로 빛을 이용해서 신호를 전달하다. 즉 FC의 명령어를 빛으로 변환하고 이 빛을 검출하여 모터의 속도를 조절한다.
optp 변속기를 사용할 경우 모터와 수신기 사이의 전파 방해가 감소하고 제어 오차가 감소하는 장점이 있다. 또 BEC가 없기 때문에 가격도 저렴하다.
Opto 변속기는 5V 전원선이 없기 때문에 신호선과 접지선만 있다.
8. 변속기의 반도체 스위칭 구동회로?
반도체 스위칭 소자는 대부분 MOSFET를 사용하는데, 이 반도체 소자는 3 개의 단자로 구성되어 있다. 3 단자의 이름은 게이트(gate), 소스(source), 드레인(drain)이다. 이 3 단자 중 게이트에 일정 전압이 인가되면 소스와 드레인으로 전류가 흐르게 된다.
반도체 스위칭 구동회로는 프로세서에서 보내는 신호에 따라 반도체 스위칭 소자의 게이트 단자를 조절해서 모터의 회전속도를 변경한다.

반도체 스위칭 소자는 MOSFET으로 이루어진 전자회로로 반도체 스위칭 구동회로의 게이트 단자 조절에 따라 MOSFET을 on/off 하는 스위칭 기능을 한다. 이 스위칭에 따라 모터의 코일 U, V, W에 전원을 공급한다.
회전자 위치 전기회로는 모터의 회전자의 위치를 감지해서 프로세서에 회전자의 위치 정보를 전달한다.
앞서 드론 만들기 - 모터에서 언급한 것처럼 드론에서는 모터에서 발생하는 기전력을 이용하여 회전자의 위치를 감지한다. 프로세서는 회전자 위치 정보와 FC에서 보내오는 신호에 따라 반도체 스위칭 구동회로를 조절한다.
9. 변속기의 캐패시터?
배터리 연결 선에 위치한 캐패시터는 배터리의 전력을 안정적으로 변속기에 공급한다.
10. 어떤 변속기를 구매해야 하나?
변속기를 구매할 때 고려해야 할 요소가 몇 가지가 있다.

- 펌웨어 호환
가장 먼저 고려해야 하는 것은 구매한 FC와 변속기의 프로세서와 펌웨어가 호환이 되는지 여부이다.
보통 변속기가 일정 FC와 호환되지 않을 경우에는 판매 사이트에 표기가 되어있다. 구매 시 놓치지 말고 확인해야 한다.
더 세부적으로 원하는 사양에 따라 변속기의 프로토콜까지 고려할 수 있지만, 취미로 만드는 드론의 경우에는 가격적인 측면 때문에 대부분 standard PWM을 사용한다.
- 최대 허용 전압
변속기가 FC와 호환이 된다면 그다음에 고려해야 할 사항은 변속기가 사용할 수 있는 배터리 용량, 즉 최대 리튬 폴리머 배터리 팩 개수이다.
보통 드론의 배터리 사양은 모터를 선택할 때 결정된다. 위의 그림에서도 보듯이 판매하는 변속기에는 사용 가능한 배터리 팩의 사양이 적혀 있기 때문에 사양에 적합한 변속기를 선택하면 된다.
만약 변속기의 최대 허용 전압이 모터의 사양보다 낮다면 변속기뿐만 아니라 모터까지도 탈 수 있으므로 주의해서 구매해야 한다.
배터리와 변속기 사이에는 가끔 전압 스파크가 발생하는데, 이를 예방하기 위해서 필요한 용량보다 더 큰 용량을 갖는 변속기를 선택하기도 한다. 왜냐하면 용량이 큰 변속기의 스위칭 소자(MOSFET)는 더 높은 전압 내성(voltage tolerance)을 갖기 때문이다. 하지만 배터리의 용량이 커질수록 무게와 사이즈가 더 커지는 점도 고려해야 한다.
- 최대 허용 전류
최대 허용 전류 역시 모터의 사양에 따라 결정된다. 모터의 사양 설명서를 보면 모터의 최대 허용 전류(peak current)가 표기되어 있는데, 변속기는 모터의 최대 허용 전류를 초과하는 용량을 가져야 한다. 일반적으로 모터의 것보다 20% 정도 더 큰 용량을 선택한다.
만약 모터의 최대 허용전류보다 변속기의 최대 허용전류가 낮다면, 모터 회전 시 변속기는 과열되어 고장이 날 수도 있고 심한 경우에는 변속기에 불이 붙을 수도 있다. 물론 용량이 큰 변속기를 사용하면 과열도 예방하고 효율까지 상승하겠지만, 최대 허용 전류가 커질수록 변속기의 크기와 무게도 커진다는 단점이 있다.
- BEC 유무
BEC가 포함된 변속기를 선택할 경우, BEC를 사용할지 또는 UBEC를 사용할지 결정해야 한다. 만약 둘 중 하나를 선택했다면 BEC의 허용전류도 확인해야 한다. 보통 BEC의 출력 전압은 5V로 동일하지만, 허용 전류는 제품마다 1~3A로 다르므로 필요한 사양에 맞게 선택해야 한다. 즉, BEC의 전류량이 각 부품이 동작할 때 필요로 하는 전류량을 견딜 수 있는지 확인해야 한다.
예로 수신기 전류량이 100 mA, FC 200 mA, 기타 부속품 100 mA라면 총 전류량은 400 mA로 BEC는 이 전류량을 견딜 수 있어야 한다.
만약 BEC가 없는 opto 변속기를 선택한다면 크기가 작고 가격 면에서 저렴할 수 있지만, 5 V 전원 공급장치가 추가적으로 설치해야 한다.
BEC가 있는 변속기는 크기가 optp 변속기보다 더 크지만, 드론 전체로 볼 때 부가적인 전원장치(배터리)가 필요하지 않기 때문에 드론 전체의 무게는 더 가벼울 수도 있다.
위의 그림에서 보듯이 판매하는 변속기 겉면에는 BEC 유무 뿐만 아니라 BEC에 대한 자세한 사양도 적혀있다.
- 단일 변속기 또는 통합 변속기(4in 1)
변속기 선택 시 또 다른 고려요소는 단일 변속기를 사용하느냐 아니면 하나의 기판에 4개의 변속기가 있는 통합 변속기(4in1)를 사용할 것인가이다.
통합 변속기를 사용할 경우 4개의 변속기가 하나의 기판에 있기 때문에 전선 처리가 단순하고 깔끔하다. 또 변속기가 1 개이기 때문에 드론 프레임의 중앙에 설치하면 무게 분배가 쉽고 관성모멘트까지 줄일 수 있어서 소형 드론에는 매우 유용하다.
하지만 하나의 변속기라도 고장이 나면 다른 변속기도 사용할 수 없는 단점이 있다.
'만들기 > 드론' 카테고리의 다른 글
| [드론 만들기] 용어 (0) | 2020.03.28 |
|---|---|
| 드론 만들기 - 비행금지구역 (0) | 2020.03.26 |
| 드론 만들기 - 모터 (3) | 2020.03.01 |
| 드론 만들기 - 비행 제어기 (FC) (2) | 2020.02.28 |
| [드론 만들기] 기본 부품 (0) | 2020.02.28 |





댓글 영역