고정 헤더 영역
상세 컨텐츠
본문
이전 글...
드론 만들기
하드웨어
[드론 만들기] Pixhawk의 텔레메트리(Telemetry)
[드론 만들기] QGroundControl에서 Pixhawk 4 펌웨어 설치
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 1/2
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 2/2
[드론 만들기] Pixhawk 4의 Power Management Board
[드론 만들기] 파워 분배기(PDB, Power Distribution Board)
소프트웨어
[드론 만들기] MissionPlanner와 QGroundControl
[드론 만들기] QGroundControl 사용방법 1/3
[드론 만들기] QGroundControl 사용방법 2/3
[드론 만들기] QGroundControl에서 Pixhawk 4 펌웨어 설치
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 1/2
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 2/2
[드론 만들기] QGroundControl에서 Pixhawk 파라미터 변경하기
조립
[드론 만들기] Power Management Board에 커넥터 연결하기
[드론 만들기] GPS, Telemetry Pixhawk 4에 연결하기
비행
[드론 만들기] 쿼드콥터(Quadcopter) 비행 원리
기타
[드론 만들기] VMware Workstation Pro 설치하기
[드론 만들기] VMware Workstation Player에 Virtaul Machine 만들기
[드론 만들기] VMware Workstation Player에 Ubuntu 설치하기
완전 초짜의 드론 만들기 도전! 도전! 도전~!입니다.
맨땅에 헤딩~
인터넷 검색, 관련 사이트를 참고하여 Pixhawk 4(PX4)를 이용한 중/소형 드론을 만들려고 하고 있습니다.
참고만 하세요~!
변속기와 모터 조립 시 편의성을 위해서 커넥터를 연결([드론 만들기] 모터, 변속기에 커넥터 연결하기)한 것처럼 Power Management Board(PMB)에도 변속기 조립 시 쉽게 분리, 연결을 위해서 XT60과 PWM 신호선, 접지선으로 사용할 전선을 PMB에 연결한다.
납땜을 위한 준비재료는 인두기, 납, 롱로우즈/니퍼, 열수축 튜브(4mm, 8mm)이다.
납땜 시 건강에 해로운 납 연기가 많이 발생하기 때문에 공기 순환이 잘 되는 곳 또는 개방된 곳에서 작업을 한다.

여기에 추가로 전원 선으로 사용할 AWG 16과 PWM 신호선과 접지선을 사용할 AWG 20이 필요하다.
전원선으로 AWG가 더 작은 것, 신호선과 접지선으로는 AWG가 더 큰 전선도 괜찮다.
쿼드콥터를 만들 예정이므로 4개의 변속기(ESC)를 Power Management Board에 연결할 예정이므로 PMB에 연결할 전선은 아래와 같다.

Power Management Board에 M1, M2, M3, M4라고 적힌 표기 옆의 GND과 B+점에는 변속기와 연결할 XT 60 male을 연결하고 변속기의 PMW 신호선은 M1, M2, M3, M4라고 적힌 글자 바로 아래 작은 구멍에 연결한다.
Pixhawk의 변속기(ESC)에서 보았듯이 변속기 펄스의 잡음을 줄이기 위해서 PWM 접지선을 꼭 연결해주어야 한다.
접지선은 변속기 전원을 연결하는 GND에 겹쳐서 연결해도 되고 남은 M5~M8의 GND에 연결해도 된다.
여기서는 납땜 편의성을 위해서 후자의 방법을 적용한다.
1. 변속기 전원선 연결하기
변속기의 전원선을 PMB에 연결하기 전에 먼저 전원선을 만들어야 한다.
앞에서 언급했듯이 전원선에는 XT60 male을 사용한다.

먼저 XT60 커넥터에 연결할 AWG 16 전선을 준비한다.
전선의 끝단은 아래 그림처럼 니퍼나 롱로우즈로 끝단 피복을 약 0.5 ~ 1.0 mm 정도 벗겨낸다.
롱로우즈/니퍼로 전선의 끝단을 살짝 물려서 피복을 잘라낸 후 피복 끝단을 당기면 손쉽게 전선 피복을 제거할 수 있다.

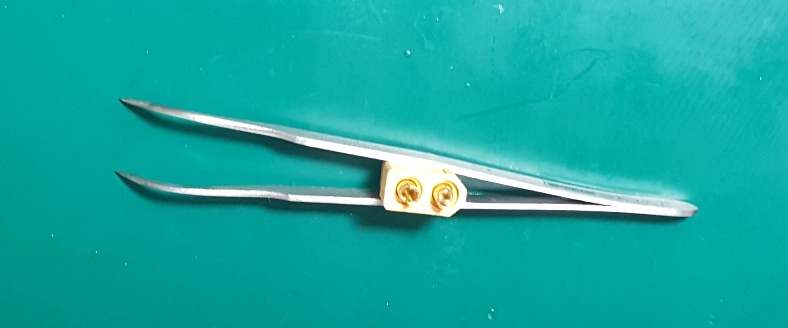
변속기에 XT60 커넥터를 연결할 때처럼 핀셋에 커넥터를 꽂아 움직이지 못하도록 고정한다.
인두기로 커넥터 금속 부분을 달군 후 납이 빈 공간을 채울 정도로 녹이는데, 커넥터 안쪽에서 인두기 끝을 동그랗게 그리면서 납을 녹이면 납이 깔끔하게 커넥터에 달라붙는다.
납을 너무 많이 녹이지 않도록 주의한다. 납이 넘치면 떼어내기도 어렵고 열수축 튜브로 완전히 감쌀 수도 없어 커넥터의 금속 부위에 이물질이 침투할 위험이 있다.

이젠 인두기로 채워진 납을 완전히 녹인 후 납이 식기 전에 피복이 벗겨진 전선을 녹은 납 안으로 밀어 넣는다.

1-2초가 지나면 납이 굽어져서 단단히 고정된다.
납이 부족해서 피복이 벗겨진 전선이 그대로 보이면 납을 더 녹여줘도 된다.
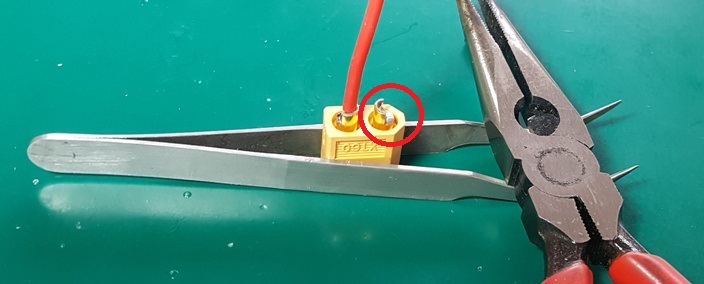
주의해야 할 것은 위의 커넥터 그림에서 보듯이 커넥터의 모양이 비대칭이기 때문에 어느 쪽에 +전선을 어느 쪽에 - 전선을 연결할 것인지 정한 후에 실수 없이 납땜 작업을 해야 한다. 아무 생각 없이 하다가는 어렵게 만든 전선을 다시 분리해야 할 수도 있다.
또 주의해야 할 점은 납땜을 할 때 커넥터에 열을 오래 가하면서 플라스틱 부분이 녹아 금속 부분에 약간만 힘을 주어도 아래로 내려갈 수 있기 때문에 조심해야 한다.
다른 한쪽 커넥터 금속 부분도 인두기로 달군 후 납을 녹여 채운다.
인두기로 채워진 납을 완전히 녹인 후 납이 식기 전에 피복이 벗겨진 전선을 녹은 납 안으로 밀어 넣는다.

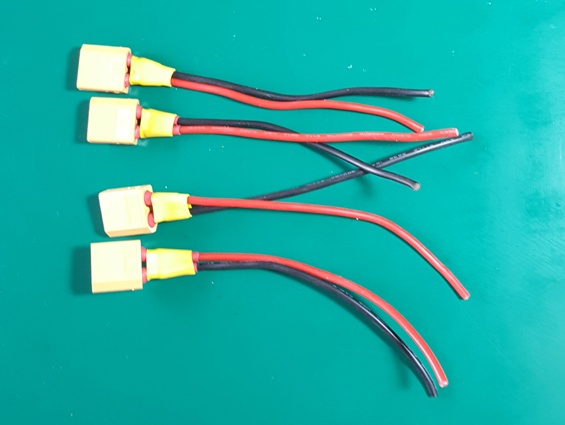
XT60를 연결한 변속기 전원선은 다음과 같다.

전선을 대략 10cm 저도 자른 후 4 mm, 8mm 열수축 튜브를 끼운 후 열을 가해주면 전선 만들기가 완료된다.
(사진이 제대로 찍힌 게 없어서 열수축 튜브 사용방법은 [드론 만들기] 모터, 변속기에 커넥터 연결하기 참조)
이제는 만든 전선을 Power Management Board에 연결한다.
만든 전선의 끝단 피복을 약 5mm 정도 벗겨낸다.
롱로우즈/니퍼로 전선의 끝단을 살짝 물려서 피복을 잘라낸 후 피복 끝단을 당기면 손쉽게 전선 피복을 제거할 수 있다.

전선 준비가 완료되면 PMB에 전선을 연결한다.
먼저 변속기 전원선의 접지선인 검은 전선을 납땜한다.
GND라고 표기되어 있는 금속 부분을 인두기로 달군 후 납을 녹인다.
납이 충분히 녹으면 피복을 벗겨낸 전선 끝단을 납땜 부위에 부착시킨다.

납이 충분하지 않을 경우 전선이 빠지지 않도록 조심하면서 납을 더 녹인다.
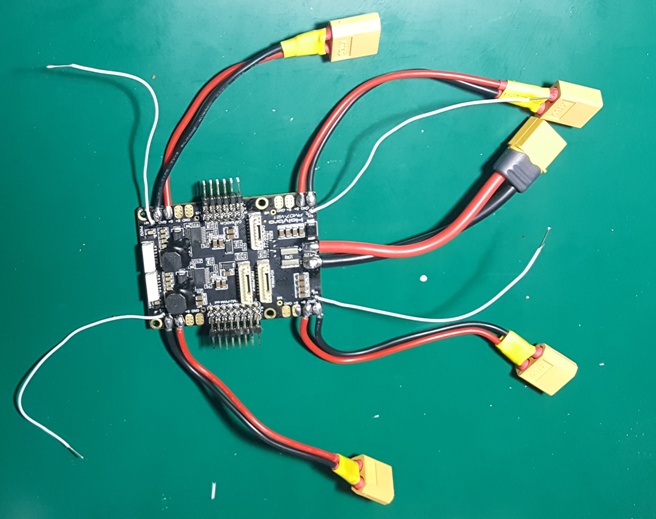
그다음으로 붉은 전선을 + 표기가 있는 금속 부분에 납땜해서 연결한다.

M2~M4의 위치에 나머지 전선을 연결한다.
(개구리 같다)

2. 변속기 신호선 연결하기
이제는 변속기의 신호선을 연결한다.
먼저 사용할 PWM 접지선과 신호선을 준비한다.
변속기 PWM 커넥터에 꽂을 부분은 약 5mm, PMB에 연결할 부분은 약 5mm 정도로 전선 양 끝단을 피복한다.

먼저 신호선을 PMB에 연결한다.
PMW 신호선 구멍으로 만들어 놓은 신호선을 밀어 넣는다(5mm 정도 피복이 된 끝단).
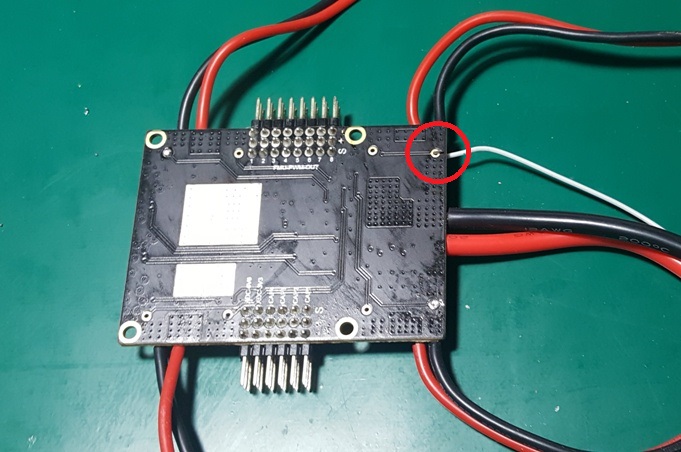
선이 빠지지 않도록 구부려준 후 인두기로 신호선과 기판의 금속 부분을 달군 후 납을 녹여가며 납땜한다.

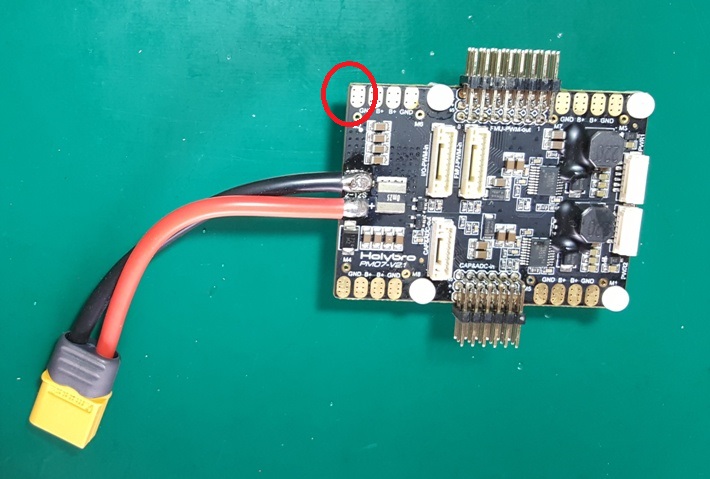
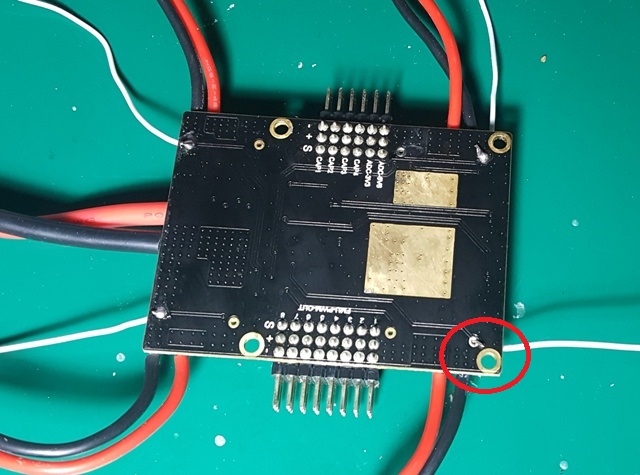
납땜이 완료된 앞면은 아래와 같다.

만약 아래 그림처럼 아랫면으로 튀어나온 전선이 다른 금속 부분과 접촉할 정도로 길 경우에는 전선 끝단을 잘라준다.
(옆의 큰 구멍은 스크루 구멍인데 신호선이 이 구멍과 접촉하면 신호선이 접지되는 것과 같다.)
남은 PWM 신호선에 납땜을 끝내면 PWM 신호선 연결이 완료된다.
이제는 접지선을 PMB에 연결한다.
먼저 PWM 접지선을 연결할 나머지 4개 GND 금속에 납을 적당히 녹인다.
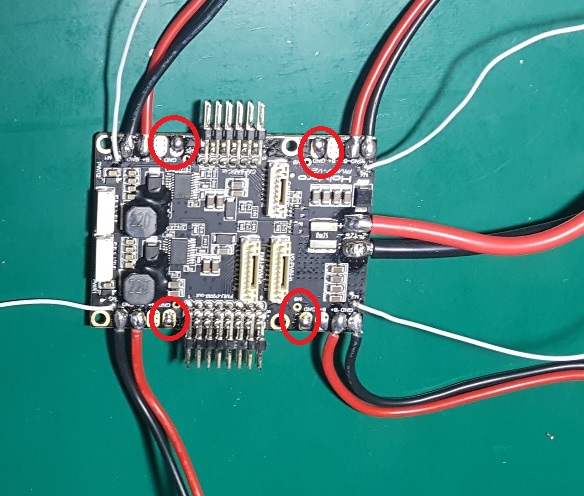
차례대로 납을 녹여가며 검은색 접지선을 연결하면 PMB에 커넥터 연결하기가 완료된다.

'만들기 > 드론' 카테고리의 다른 글
| [드론 만들기] MAVLink (0) | 2020.07.11 |
|---|---|
| [드론 만들기] 변속기(ESC)와 Power Management Board 연결하기 (0) | 2020.07.07 |
| [드론 만들기] Pixhawk의 변속기(ESC) (0) | 2020.07.05 |
| [드론 만들기] 파워 분배기 (PDB, Power Distribution Board) (0) | 2020.07.03 |
| [드론 만들기] QGroundControl 사용법 2/4 (0) | 2020.07.02 |





댓글 영역