고정 헤더 영역
상세 컨텐츠
본문
이전 글...
드론 만들기
하드웨어
[드론 만들기] Pixhawk의 텔레메트리(Telemetry)
[드론 만들기] QGroundControl에서 Pixhawk 4 펌웨어 설치
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 1/2
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 2/2
[드론 만들기] Pixhawk 4의 Power Management Board
[드론 만들기] 파워 분배기(PDB, Power Distribution Board)
소프트웨어
[드론 만들기] MissionPlanner와 QGroundControl
[드론 만들기] QGroundControl 사용방법 1/4
[드론 만들기] QGroundControl 사용방법 2/4
[드론 만들기] QGroundControl에서 Pixhawk 4 펌웨어 설치
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 1/2
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 2/2
[드론 만들기] QGroundControl에서 Pixhawk 파라미터 변경하기
[드론 만들기] VMware Workstation Pro 설치하기
[드론 만들기] VMware Workstation Player에 Virtaul Machine 만들기
[드론 만들기] VMware Workstation Player에 Ubuntu 설치하기
조립
[드론 만들기] Power Management Board에 커넥터 연결하기
[드론 만들기] 변속기(ESC)와 Power Management Board 연결하기
[드론 만들기] GPS, Telemetry Pixhawk 4에 연결하기
통신
비행
[드론 만들기] 쿼드콥터(Quadcopter) 비행 원리
기타
완전 초짜의 드론 만들기 도전! 도전! 도전~!입니다.
맨땅에 헤딩~
인터넷 검색, 관련 사이트를 참고하여 Pixhawk 4를 이용한 중/소형 드론을 만들려고 하고 있습니다.
참고만 하세요~!
커다란 소음을 만들어내며 하늘 위를 이리저리 왔다 갔다 하는 드론을 보면 신기하다.
4 개의 프로펠러가 장착되어있는 쿼드콥터(Quadcopter)는 어떻게 하늘을 나는 것일까?
1. 쿼드콥터는 어떻게 날아오르나?
쿼드콥터의 프로펠러가 양력을 만들어내는 원리는 헬리콥터의 것과 비슷하다.
(자세한 프로펠러의 원리는 여기 참조)
하지만 헬리콥터와 달리 4개의 프로펠러가 있는 쿼드콥터는 어떻게 양력을 조절해서 하늘 위로 떠오르는 걸까?

프로펠러는 회전을 하면서 양력을 만들어내지만, 동시에 반작용으로 쿼드콥터에 토크(torque)가 발생한다. 이 토크를 적절히 상쇄시키지 못하면 쿼드콥터는 회전하게 되고 심할 경우 비행도 불가능하다.
이 토크를 상쇄시키기 위해서 쿼드콥터는 4개의 프로펠러 중 두 개는 시계방향, 다른 두 개는 반시계 방향으로 회전하도록 한다. 물론 각 쌍의 모터는 동일한 회전축에서 동일한 방향으로 회전한다.
이때 서로 마주 보는 프로펠러는 동일한 방향으로, 인접한 프로펠러는 반대방향으로 회전하게 함으로써 프로펠러가 회전하면서 발생하는 토크를 서로 상쇄하게 만든다.
|
|
| Quadcopter + (출처: www.wikipedia.org) | Quadcopter x/H (출처: www.wikipedia.org) |
위의 그림은 쿼드콥터 중 대중적으로 많이 사용하는 Quadcopter +, x, H의 프로펠러 회전 방향이다.
4개의 프로펠러가 동일한 회전 속도로 회전하면서 만들어내는 총 양력(thrust)의 크기가 쿼드콥터의 무게를 초과하게 되면 쿼드콥터가 하늘 위로 상승하게 된다.
|
|
| Quadcopter + (출처: www.wikipedia.org) | Quadcopter x/H (출처: www.wikipedia.org) |
만약 프로펠러의 회전 속도가 동일하지 않다면 토크가 상쇄되지 않아 쿼드콥터는 회전하게 되고 또 프로펠러가 만들어내는 추력이 동일하지 않기 때문에 안전하게 이륙할 수 없다.
쿼드콥터를 착륙/하강할 때는 4개 프로펠러의 회전 속도를 줄여 드론의 무게보다 추력을 떨어뜨리면 된다.
2. 드론은 어떻게 회전하나?
드론 비행 동영상을 보면 드론이 공중에서 빙글빙글 회전하는 것을 볼 수 있다.
이런 회전을 요(yaw) 축을 중심으로 회전한다고 하거나 또는 요잉(yawing)이라고 하는데 회전하는 원리를 알아보기 전에 우선 쿼드콥터의 방향과 좌표계 정의를 알아야 용어의 이해가 쉽다.
드론이 회전하는 원리는 간단하다.
앞서 설명했듯이 회전하는 프로펠러로 인해서 드론에 토크가 발생하는데 드론의 회전은 이 토크을 이용한다.
쿼드콥터의 경우에는 4개 모터의 회전 속도를 다르게 설정해서 토크가 완전히 상쇄되지 못하도록 하고, 이 남은 토크로 쿼드콥터가 회전한다.
- 좌측 방향으로 회전
4 개의 모터 중 시계방향의 모터 회전 속도를 높이고 반시계 방향의 모터 회전 속도를 낮추면, 쿼드콥터는 제자리에서 반시계 방향, 즉 왼쪽 방향으로 회전하게 된다.
|
|
| Quadcopter + (출처: www.wikipedia.org) | Quadcopter x/H (출처: www.wikipedia.org) |
위의 그림에서 회전 방향의 화살표가 굵을수록 회전 속도가 더 빠르다는 의미이다.
- 우측 방향으로 회전
4 개의 모터 중 반시계 방향의 모터 회전 속도를 높이고 시계방향의 모터 회전 속도를 낮추면, 쿼드콥터는 제자리에서 시계방향, 즉 왼쪽 방향으로 회전하게 된다.
|
|
| Quadcopter + (출처: www.wikipedia.org) | Quadcopter x/H (출처: www.wikipedia.org) |
단순하게, 회전하고 싶은 방향의 반대방향으로 회전하는 모터의 회전 속도를 높이면 쿼드콥터는 원하는 방향으로 회전하게 된다.
3. 드론은 어떻게 전후/ 좌우 방향으로 비행하나?
드론이 전후/좌우 비행을 하려면 그 방향으로 추력이 가해져야 하는데 좌우/전후 대칭인 Quadcopter +, x, H 같은 쿼드콥터일 경우에 전후/좌우 비행 원리는 동일하다
- 전진 비행
Quadcopter x/H의 경우 앞으로 비행을 하기 위해서 뒤쪽에 있는 모터 쌍의 회전 속도를 앞쪽의 모터 쌍보다 더 빠르게 하고 Quadcopter +의 경우 뒤쪽의 모터 회전 속도를 높이고 앞쪽의 모터 회전 속도를 낮춘다.
|
|
| Quadcopter + (출처: www.wikipedia.org) | Quadcopter x/H (출처: www.wikipedia.org) |
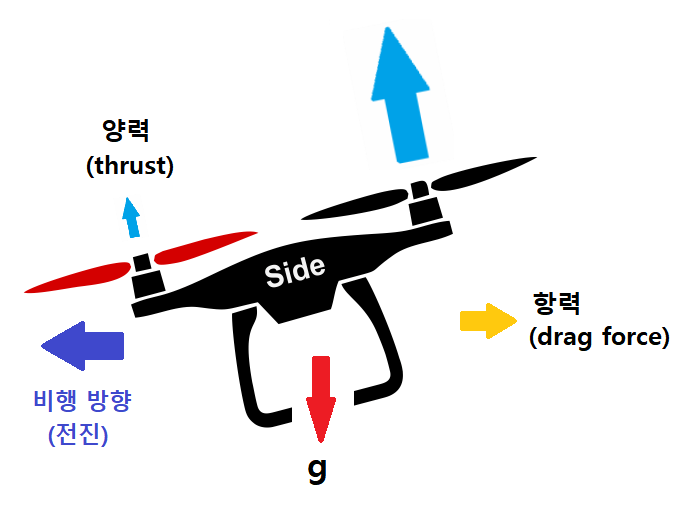
뒤쪽의 프로펠러가 더 빠른 속도로 회전하기 때문에 앞쪽의 프로펠러보다 더 큰 추력을 만들어내서 쿼드콥터는 약간 앞으로 기울게 된다.
위의 그림처럼 프로펠러가 비스듬해지면 발생하는 프로펠러에서 만들어지는 양력도 비스듬해지면서 전진 방향으로 추력이 발생하게 된다.
쿼드콥터를 전진하게 하는 추력은 프로펠러의 양력의 가로축 방향 크기이고, 쿼드콥터를 들어 올리는 양력의 힘은 프로펠러 양력의 세로축 방향의 크기이다.
따라서 프로펠러에서 발생하는 양력의 가로 방향의 힘이 항력보다 클 경우 쿼드콥터는 전진 방향으로 비행하게 된다.
이때 프로펠러 양력의 세로 방향 힘이 쿼드콥터의 무게보다 더 크다면 쿼드콥터는 상승하면서 전진 비행하고 더 작다면 쿼드콥터는 하강하면서 전진 비행하게 된다.
Quadcopter x/H의 경우 뒤쪽의 프로펠러 중 하나는 시계방향, 다른 하나는 반시계 방향으로 동일한 속도로 회전하기 때문에 드론에 발생하는 토크가 완전히 상쇄되지만 Quadcopter +의 경우 토크가 완전히 상쇄되지 못한다. 이 경우 쿼드콥터가 요 방향으로 회전하는 것을 막기 위해서 추가로 피치 방향 모터의 회전 속도를 조종해야 한다.
- 후진 비행
후진 비행은 전진 비행의 반대로 모터의 속도를 설정하면 된다.
|
|
| Quadcopter + (출처: www.wikipedia.org) | Quadcopter x/H (출처: www.wikipedia.org) |
후진 비행도 마찬가지로 Quadcopter x/H의 경우 앞쪽의 프로펠러 중 하나는 시계방향, 다른 하나는 반시계 방 향으로 동일한 속도로 회전하기 때문에 드론에 발생하는 토크가 완전히 상쇄되지만 Quadcopter +의 경우 토크가 완전히 상쇄되지 못한다. 이 경우 쿼드콥터가 요 방향으로 회전하는 것을 막기 위해서 추가로 피치 방향 모터의 회전 속도를 조종해야 한다.
- 우측 비행
Quadcopter x/H의 경우 오른쪽으로 비행을 하기 위해서 왼쪽에 있는 모터 쌍의 회전 속도를 오른쪽의 모터 쌍보다 더 빠르게 하고 Quadcopter +의 경우 왼쪽의 모터 회전 속도를 높이고 오른쪽의 모터 회전속도를 낮춘다.
|
|
| Quadcopter + (출처: www.wikipedia.org) | Quadcopter x/H (출처: www.wikipedia.org) |
왼쪽의 프로펠러가 오른쪽의 프로펠러보다 더 큰 추력을 만들어내서 쿼드콥터는 약간 오른쪽으로 기울게 된다.
앞서 전진 비행에서 설명한 것과 동일한 원리로 쿼드콥터는 우측 비행을 하게 된다.
전진 비행과 마찬가지로 Quadcopter x/H의 경우 왼쪽의 프로펠러 중 하나는 시계방향, 다른 하나는 반시계 방향으로 동일한 속도로 회전하기 때문에 드론에 발생하는 토크가 완전히 상쇄되지만 Quadcopter +의 경우 토크가 완전히 상쇄되지 못한다. 이 경우 쿼드콥터가 요 방향으로 회전하는 것을 막기 위해서 추가로 롤 방향 모터의 회전 속도를 조종해야 한다.
- 좌측 비행
왼쪽 비행은 오른쪽 비행의 반대로 모터의 속도를 설정하면 된다.
|
|
| Quadcopter + (출처: www.wikipedia.org) | Quadcopter x/H (출처: www.wikipedia.org) |
우측 비행과 마찬가지로 Quadcopter x/H의 경우 오른쪽의 프로펠러 중 하나는 시계방향, 다른 하나는 반시계 방향으로 동일한 속도로 회전하기 때문에 드론에 발생하는 토크가 완전히 상쇄되지만 Quadcopter +의 경우 토크가 완전히 상쇄되지 못한다. 이 경우 쿼드콥터가 요 방향으로 회전하는 것을 막기 위해서 추가로 롤 방향 모터의 회전 속도를 조종해야 한다.
5. 기타
위의 언급한 비행 방법을 조합해서 루핑(looping), 플립(flip)을 할 수 있다.
루핑이란 아래 그림처럼 드론이 둥그런 원을 그리며 나는 것을 말한다.
롤링(rolling)이란 롤 축을 중심으로 드론이 회전하는 것, 피칭(pitching)이란 피치 축을 중심으로 회전하는 것을 의미하는데 이런 회전을 플립(flip)이라고 하며 롤 축에서 플립을 하면 롤 플립, 피치 축에서 플립을 하면 피치 플립이라고도 한다.
멀티콥터(multicopter)에서 프로펠러의 회전 방향에 따라 다른 프로펠러 색깔의 프로펠러를 사용하면 프로펠러 회전 방향을 손쉽게 파악할 수 있기 때문에 프로펠러 구입 시 이런 점도 고려하면 좋다.
'만들기 > 드론' 카테고리의 다른 글
| 드론 만들기 - QGroundControl에서 Pixhawk 파라미터 변경하기 (0) | 2020.06.06 |
|---|---|
| [드론 만들기] uORB란 무엇인가 (0) | 2020.06.04 |
| 드론 만들기 - 멀티콥터(Multicopter) 종류 (0) | 2020.05.25 |
| 드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 2/2 (0) | 2020.05.21 |
| [드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 1/2 (0) | 2020.05.21 |





댓글 영역