고정 헤더 영역
상세 컨텐츠
본문
이전 글...
드론 만들기
하드웨어
드론 만들기 - QGroundControl에서 Pixhawk 4 펌웨어 설치
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 1/2
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 2/2
드론 만들기 - Power Management Board
소프트웨어
드론 만들기 - MissionPlanner와 QGroundControl
드론 만들기 - QGroundControl에서 Pixhawk 4 펌웨어 설치
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 1/2
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 2/2
조립
드론 만들기 - GPS, Telemetry Pixhawk 4에 연결하기
비행
드론 만들기 - 쿼드콥터(Quadcopter) 비행 원리
기타
드론 만들기 - VMware Workstation Pro 설치하기
드론 만들기 - VMware Workstation Player에 Virtaul Machine 만들기
드론 만들기 - VMware Workstation Player에 Ubuntu 설치하기
완전 초짜의 드론 만들기 도전! 도전! 도전~!입니다.
맨땅에 헤딩~
인터넷 검색, 관련 사이트를 참고하여 Pixhawk 4를 이용한 중/소형 드론을 만들려고 하고 있습니다.
참고만 하세요~!
드론을 한번 만들어봐야겠다고 별생각 없이 시작할 때만 해도 프로펠러가 4개 달린 것이 그냥, 말 그대로 드론인 줄 알았다.
알고 보니 드론이라는 말 자체도 '웅웅 거리는 소리'를 의미하고 조종사가 없는 무인항공기(Unmanned Aerial Vehicle System, UAV System)를 통칭한다. 뉴스에서 소형 비행기처럼 생긴 것을 드론이라고 명칭 했던 것이 떠오른다.

흠...
드론이라고 생각했던 4개의 프로펠러로 비행하는 것은 드론의 한 종류로, 정확한 명칭은 쿼드콥터(Quadcopter)이다.
여기서 쿼드(Quad)는 라틴어에서 유래한 말로, 4 또는 네 번째를 의미하고 copter는 Helicopter의 약자로 쿼드콥터는 헬리콥터처럼 4개의 프로펠러가 회전해서 양력을 얻는 무인비행선이라는 뜻이다.
콥터 앞에 3을 뜻하는 트라이(Tri)를 붙이면 트라이 콥터, 5를 뜻하는 펜타가 붙으면 펜타콥터가 된다. 이런 다수의 프로펠러를 사용하는 드론 형태를 통틀어서 멀티콥터(Multicopter)라고 한다.
Pixhawk 4의 설명을 보면 모터를 최대 16개를 연결할 수 있는 것 같으니까 pixhawk 4로 드론을 만들 경우 이론적으로는 Sedeccopter까지 가능할 것 같다.
하지만 인터넷에서 여러 번만 클릭해봐도 프로펠러를 16개를 달고 있는 멀티콥터를 찾을 수 없다.
그럼 실제 많이 만들어지고 사용되는 멀티콥터에는 어떤 것이 있나?
1. 트라이 콥터 (Tricopter)

프로펠러가 3개 달린 멀티콥터로 보통 120도 각도로 나눠져 장착되어있다.
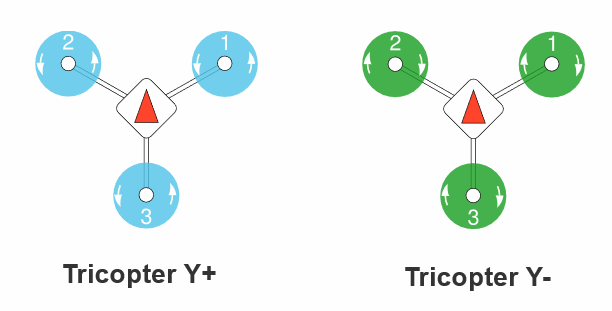
프로펠러의 개수가 쿼드콥터보다 적어 추력이 낮고 3개의 프로펠러가 회전할 때 발생하는 토크(torque)가 완전히 상쇄되지 않아 비행 조정이 어렵고 안정성도 떨어지진다. 하지만 부품의 수가 적어 가격은 더 저렴하다.
주로 소형 장난감 용으로 많이 사용된다.
2. 쿼드콥터(quadcopter)

프로펠러가 4개 있는 멀티콥터이다.
멀티콥터 중 기계적으로 가장 단순한 구조이며 프로펠러 한 쌍은 시계방향으로, 다른 한 쌍은 반시계 방향으로 회전함으로써 프로펠러 회전 시 발생하는 토크가 서로 상쇄되어 비행이 안정적이다.
또한 작은 카메라 등을 장착할 수 있을 정도의 추력을 만들어낼 수 있어서 멀티콥터 중 대중적으로 가장 많이 사용되고 있다.
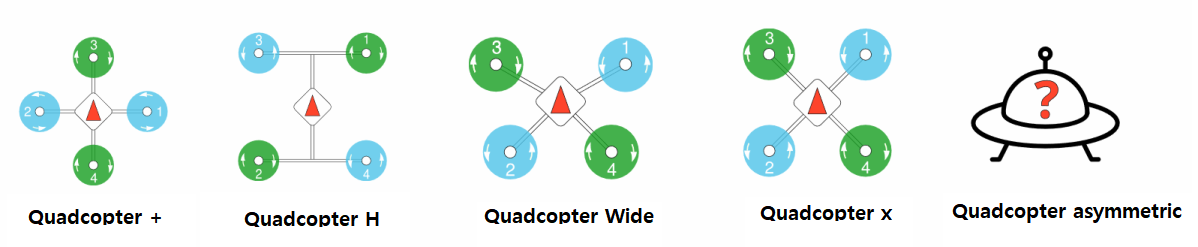
픽스호크는 다양한 형태의 쿼드콥터 형태를 지원하다. 이들의 모양은 다르지만 기본적으로 4개의 프로펠러 속도를 조절하여 드론을 좌우, 전후로 이동하거나 회전하는 원리는 동일하다.
Quadcopter Wide나 Quadcopter asymmetric처럼 비대칭적인 형태도 있지만 설계의 편의성과 안정적인 비행을 위해서 특별한 목적이 있지 않는 한 가능하면 기체(airframe)의 가운데에 무게 중심이 발생하는 전후, 좌우가 대칭되는 Quadcopter H, Quadcopter+, Quadcopter x를 선호한다.
Quadcopter H라는 이름은 위에서 보듯이 프레임(frame)의 모양에서 따온 것이다. 프레임 모양 덕택으로 다른 쿼드콥터에 비해서 외부 충격에 더 강하지만 그만큼 무겁다.
Quadcopter +는 프로펠러가 +모양으로 장착되는 쿼드콥터로 가장 큰 장점은 비행 조정이 직관적이라는 것이다.
전후, 좌우로 비행할 때, Quadcopter H 또는 X의 경우 4개의 모든 모터를 조종해야 하지만 Quadcopter +의 경우에는 해당하는 방향의 모터 쌍만 조정해서 비행할 수 있다.
비행이 직관적이라 조정은 쉽지만 하나의 모터가 고장이 날 경우 드론은 바로 추락할 수 있다.
또 다른 단점은 촬영용 카메라를 장착한 경우 프로펠러가 카메라의 시야를 가릴 수 있어 촬영 용 드론으로는 적합하지 않다.
Quadcopter x는 위의 그림에서 보듯이 프로펠러가 X모양으로 장착되는 형태로 가장 대중적인 멀티콥터 형태이다.
앞서 Quadcopter +에서 언급했듯이 Quadcopter x는 4 개의 프로펠러의 회전 속도를 변경해 비행하기 때문에 단순하게 보면 2개의 프로펠러만을 사용하는 Quadcopter +에 비해서 제어 시스템이 더 복잡해서 큰 단점만 있는 것 같기도 하다.
하지만 만약 드론에 카메라 등의 부하(load)가 장착되어있거나, 비행 중 모터가 임계점 근처에서 동작하고 있을 경우, 드론을 전후 또는 좌우로 비행하려고 한다면 4개의 프로펠러가 동시에 조종되는 Quadcopter x가 더 낫다.
왜냐하면 QuadCopter x는 프로펠러 4 개의 회전 속도가 모두 변경되어 더 큰 추력을 만들어내기 때문에 Quadcopter +의 모터 비해 각 모터가 견뎌야 하는 부하가 더 작기 때문이다.
마찬가지로 동일한 비행속도를 만들어내기 위해서 프로펠러 4개를 모두 사용하는 QuadCopter x보다 Quadcopter +의 회전 속도 변화량은 거의 두 배가 되기 때문에 모터에 가해지는 부하가 Quadcopter x보다 Quadcopter +가 더 커서 모터가 더 과열/손상되기 쉽다.
Quadcopter x가 피치(pitch, 좌우 방향)와 롤(roll, 전후 방향) 조정이 요(yaw, 상하 방향)와 분리되어있는 것과는 달리, Quadcopter +는 좌우 또는 전후 이동 시 요 모멘트(yaw moment)가 발생한다.
따라서 동일한 속도로 전진할 때 Quadcopter +는 요(yaw)에서 발생하는 모멘트(moment)를 보상하기 위해서 더 큰 피치 제어(pitch control)가 필요하기 때문에 Quadcopter x보다 전력소비가 더 크다.
또 Quadcopter x를 촬영 용 드론으로 사용하려고 할 때는 Quadcopter +와 달리 카메라를 장착해도 프로펠러가 카메라 시야를 가리지 않는다.
이러한 이유로 쿼드콥터 형태 중 Quadcopter +보다 Quadcopter x를 더 선호한다.
3. Pentacopter

프로펠러가 5개인 멀티콥터로 인터넷에서 사진을 찾기 힘들 정도로 잘 사용하지 않는다.
기체의 형태는 위의 그림처럼 쿼드콥터 꼬리 쪽에 로터를 추가한 형태나, 쿼드콥터의 가운데에 로터를 추가한 형태 등이 있다.
프로펠러의 개수가 홀수이기 때문에 트라이콥터처럼 프로펠러 회전 시 발생하는 토크(torque)가 완전히 상쇄되지 않기 때문에 비행 제어가 복잡하다.
픽스호크에서 기본으로 제공하는 펜타콥터 형태는 없기 때문에 펜타콥터를 만들 고 싶을 경우 직접 프로그래밍해서 만들어야 한다.
4. Haxacopter

프로펠러가 6개인 멀티콥터로 일반적인 형태는 60도 간격으로 6개의 프로펠러가 장착되어있는데 비행 원리는 쿼드콥터와 유사하다.
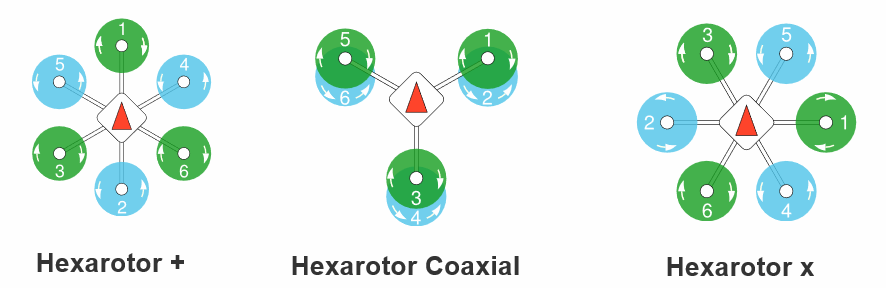
프로펠러의 개수가 6개이기 때문에 쿼드콥터에 비해서 더 높은 추력을 만들어낼 수 있고 더 세밀한 제어가 가능하다.
높은 추력으로 쿼드콥터에 비해 더 높은 고도로도 비행할 수 있고 더 큰 부하(load)를 휴대할 수도 있으며 바람 등과 같은 외력에도 안전한 비행이 가능하다.
또 다른 장점은 비행 중에 프로펠러나 모터 중 한 개가 손상되어도 5개의 프로펠러로 안전하게 비행, 착륙이 가능하다. 이 때문에 쿼드콥터보다 더 안정적이어서 고가 카메라를 장착할 경우 쿼드콥터보다 더 선호된다.
쿼드콥터와 비교한 또 다른 장점으로는 소음이 적다. 하지만 쿼드콥터에 비해서 전력소비가 크고 더 많은 부품을 사용하기 때문에 비싸고 구조가 더 복잡하다.
5. Octocoptor
프로펠러가 8개인 멀티콥터로 일반적인 형태는 45도 간격으로 프로펠러가 장착된 대칭형으로 비행 원리는 쿼드콥터와 유사하다.

헥사콥터에 비해 더 큰 추력을 만들어내고 더 세밀한 제어가 가능할 뿐만 아니라 빠른 비행으로 기동성도 더 좋다.
큰 추력으로 더 높은 고도에서 비행이 가능하며 무거운 카메라, 보조 배터리, 물품 수송 등 큰 부하(load)를 휴대할 수 있어 물류, 농업 분야에서 많이 응용되고 있으며, 비와 강풍 속에서도 안전한 비행도 가능하다.
비행 중 최대 4개의 프로펠러나 모터가 고장이 나도 여전히 비행이 가능하다. 이러한 높은 신뢰성과 안정성으로 고가의 카메라를 장착할 때 사용된다.
가장 큰 단점은 높은 전력소비다. 그렇다 보니 비행시간이 짧아 보조배터리가 필요하고 자주 충전해주어야 한다.
또 비싼 가격과 복잡한 구조로 고장이 나면 수리하는데 비용이 많이 들고 너무 커서 수송하거나 가지고 다니기 어렵다.
6. 그 외 멀티콥터
공기역학적 측면에서 보면 프로펠러의 개수가 증가할수록 효율은 떨어지기 때문에 연구 등의 특별한 목적이 있지 않는 한 멀티콥터에 8개 를 초과하는 프로펠러를 잘 사용하지 않는다.
이전 글...
드론 만들기
하드웨어
드론 만들기 - QGroundControl에서 Pixhawk 4 펌웨어 설치
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 1/2
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 2/2
드론 만들기 - Power Management Board
소프트웨어
드론 만들기 - MissionPlanner와 QGroundControl
드론 만들기 - QGroundControl에서 Pixhawk 4 펌웨어 설치
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 1/2
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 2/2
조립
드론 만들기 - GPS, Telemetry Pixhawk 4에 연결하기
비행
드론 만들기 - 쿼드콥터(Quadcopter) 비행 원리
기타
드론 만들기 - VMware Workstation Pro 설치하기
드론 만들기 - VMware Workstation Player에 Virtaul Machine 만들기
드론 만들기 - VMware Workstation Player에 Ubuntu 설치하기
'만들기 > 드론' 카테고리의 다른 글
| [드론 만들기] uORB란 무엇인가 (0) | 2020.06.04 |
|---|---|
| 드론 만들기 - 쿼드콥터(Quadcopter)의 비행원리 (0) | 2020.05.28 |
| 드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 2/2 (0) | 2020.05.21 |
| [드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 1/2 (0) | 2020.05.21 |
| 드론 만들기 - VMware Workstation Player에 Ubuntu 설치하기 (0) | 2020.05.15 |





댓글 영역