고정 헤더 영역
상세 컨텐츠
본문
이전 글...
드론 만들기
하드웨어
[드론 만들기] Pixhawk의 텔레메트리(Telemetry)
[드론 만들기] QGroundControl에서 Pixhawk 4 펌웨어 설치
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 1/2
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 2/2
[드론 만들기] Pixhawk 4의 Power Management Board
[드론 만들기] 파워 분배기(PDB, Power Distribution Board)
소프트웨어
[드론 만들기] MissionPlanner와 QGroundControl
[드론 만들기] QGroundControl 사용방법 1/3
[드론 만들기] QGroundControl 사용방법 2/3
[드론 만들기] QGroundControl에서 Pixhawk 4 펌웨어 설치
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 1/2
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 2/2
[드론 만들기] QGroundControl에서 Pixhawk 파라미터 변경하기
조립
[드론 만들기] GPS, Telemetry Pixhawk 4에 연결하기
비행
[드론 만들기] 쿼드콥터(Quadcopter) 비행 원리
기타
[드론 만들기] VMware Workstation Pro 설치하기
[드론 만들기] VMware Workstation Player에 Virtaul Machine 만들기
[드론 만들기] VMware Workstation Player에 Ubuntu 설치하기
완전 초짜의 드론 만들기 도전! 도전! 도전~!입니다.
맨땅에 헤딩~
인터넷 검색, 관련 사이트를 참고하여 Pixhawk 4를 이용한 중/소형 드론을 만들려고 하고 있습니다.
참고만 하세요~!
픽스호크 4를 구매하면 파원분배기(PDB, Power Distribution Board) 역할을 하는 PMB(PM Board, Power Management Board)가 함께 동봉되어 있다보니 따로 구매를 할 필요는 없다. 그래서 PDB에 대해서 특별히 자료를 찾아봐야 할 필요성도 느끼지 못했다.
가만히 생각해보면 드론을 만드는데 들어가는 부품 중 중요하지 않는 부품이 없지만, 드론에 공급되는 전원을 관리하는 PDB의 중요성을 너무 간과한 것 같아서 정리를 해봤다.
1. 파원분배기(Power Distribution Board)는 무엇인가?
파원분배기(Power Distribution Board)는 이름에서도 알 수 있듯이 전력을 관리하는 파워 모듈로 전력을 분배기의 역할을 하며 전력 분배기라고 하기도 한다.
파워 분배기란 단일 공급 전원을 분배해서 개별 부품에 전원을 공급하는 장치이다. 예로 드론의 경우에는 배터리로 공급되는 단일 전원을 분배해서 ESC, FC나 또는 기타 저전압 전원을 사용하는 부품에 전원을 공급한다. 즉 PMB가 적절하게 전원을 분배하지 못할 경우에는 드론을 제대로 조종할 수도 없다.
물론 PDB를 무조건 사용해야 하는 것은 아니지만 개별 부품을 연결할 케이블을 보드(board)가 대체함으로써 드론 조립이 훨씬 더 간소해진다.
또 PDB는 기본적인 전력 분배뿐만 아니라 다른 기능을 포함하고 있는 경우가 많기 때문에 PDB를 사용하지 않을 경우 부수적인 PDB 기능을 사용할 수 없게 된다.
요즘 대부분의 PDB는 전력 분배뿐만 아니라 5V 또는 12V 전압 레귤레이터를 포함하고 있는 경우가 많다. 이 저전압들은 FC나 동영상 송신, 카메라 등의 부품에 전원을 공급한다.
LC-Filter를 포함하고 있는 경우도 있는데 LC-Filter란 동영상 송신기, 카메라 등의 부품에 필터링된 정확하고 필터링된 전압을 제공한다. 동영상 송신기에는 꼭 필요한 요소이다.
On Screen Display가 장착되어 있는 경우에는 동영상에 대한 정보를 텍스트 형태로 표기할 수도 있고 배터리의 전압, 소비 전류, 비행시간 등을 표기할 수 있다.
전류 센서가 있는 장착되어 있는 경우에는 전류를 측정해서 현재 및 전체 소비량을 표기한다.
2. PDB 종류
드론에서 사용되는 PDB의 종류는 몇 가지가 있다.
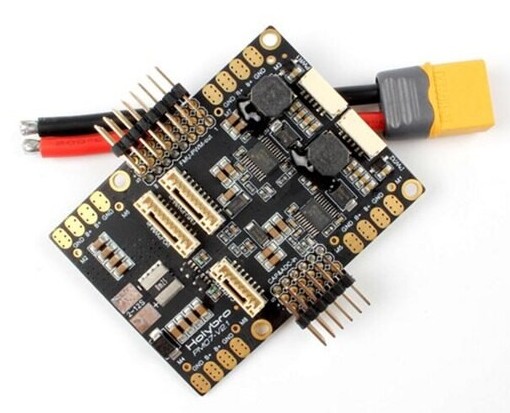
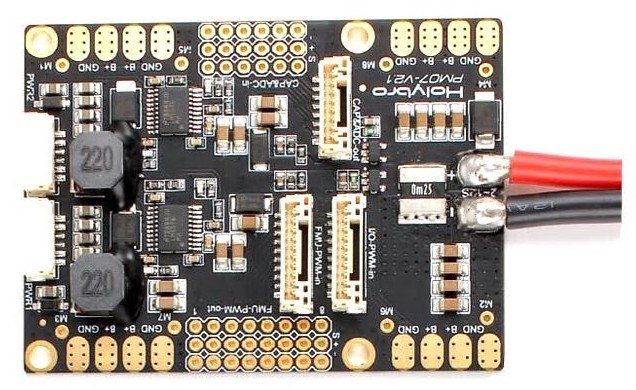
- 일반형/독립형 PDB
가장 많이 사용하는 PDB라 종류도 다양하다. 프레임이나 FC 어디나 장착이 가능하고 선택의 폭도 넓다.
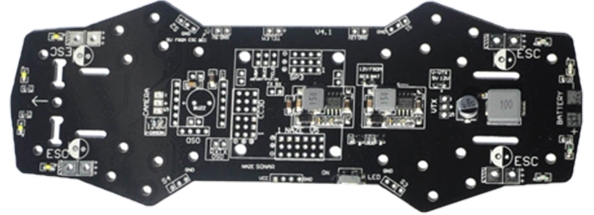
- 프레임 PDB
PDB가 프레임의 한 요소로 요즘은 선호도가 많이 떨어진다. 그 이유는 프레임 PDB를 사용할 경우 프레임 선택의 폭이 좁아지기 때문이다. 하지만 프레임의 한 요소라 케이블 사용이 확 줄어들어서 깔끔한 조립이 가능하다. 크기가 크고, 쉽게 손상이 갈 수 있어서 충격 시 높은 파손 위험도와 ESC 납땜 면이 떨어지면 프레임을 다시 재조립해야 하는 번거로움은 단점이다.
- 적층 PDB (stackable PDB)
적층 PDB는 핀 커넥터로 연결되기 때문에 비행 중 결함이 발생하면 쉽게 교환할 수 있다. 또 케이블 사용량이 작고 납땜도 줄어든다. 하지만 지원이 되는 제품에만 사용할 수 있어서 선택의 폭이 좁다.
2. PDB 선택
PDB가 동봉되어 있지 않거나 동봉된 PDB가 아닌 다른 PDB를 사용하려고 할 때는 다음 요소를 고려해서 PDB를 선택한다.
- 정격전류(Current Rating)
PDB가 이용할 수 있는 최대 전류량이 드론에 안정적인가를 고려해야 한다. 필요한 전류량은 멀티콥터의 ESC 최대 전류량을 확인하여 알 수 있다. 예로 쿼드콥터를 만 들 경 우 20A ESC 4개를 사용할 한다면 PDB는 4 x 20A, 즉 80A를 취급할 수 있어야 한다. 하지만 일반적으로 드론을 항상 최대 스트롤(throttle)로 비행하는 것이 아니기 때문에 PDB의 최대 전류량이 60A정도면 적당하다.
- 커넥터
ESC를 쉽게 납땜할 수 있는 적절한 커넥터인지를 고려해야 한다.
- 전압 레귤레이터(Voltage Regulator)
PDB 보드에 전압 레귤레이터가 포함되어있는지 확인하다. 포함되어 있을 경우 보조 전력장치로 외부 LED나 기타 장비의 전원으로 쉽게 사용할 수 있다.
이전 글...
드론 만들기
하드웨어
[드론 만들기] Pixhawk의 텔레메트리(Telemetry)
[드론 만들기] QGroundControl에서 Pixhawk 4 펌웨어 설치
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 1/2
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 2/2
[드론 만들기] Pixhawk 4의 Power Management Board
[드론 만들기] 파워분배기(PDB, Power Distribution Board)
소프트웨어
[드론 만들기] MissionPlanner와 QGroundControl
[드론 만들기] QGroundControl 사용방법 1/3
[드론 만들기] QGroundControl 사용방법 2/3
[드론 만들기] QGroundControl에서 Pixhawk 4 펌웨어 설치
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 1/2
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 2/2
[드론 만들기] QGroundControl에서 Pixhawk 파라미터 변경하기
조립
[드론 만들기] GPS, Telemetry Pixhawk 4에 연결하기
비행
[드론 만들기] 쿼드콥터(Quadcopter) 비행 원리
기타
[드론 만들기] VMware Workstation Pro 설치하기
[드론 만들기] VMware Workstation Player에 Virtaul Machine 만들기
[드론 만들기] VMware Workstation Player에 Ubuntu 설치하기
'만들기 > 드론' 카테고리의 다른 글
| [드론 만들기] Power Management Board(PMB)에 커넥터 연결하기 (0) | 2020.07.07 |
|---|---|
| [드론 만들기] Pixhawk의 변속기(ESC) (0) | 2020.07.05 |
| [드론 만들기] QGroundControl 사용법 2/4 (0) | 2020.07.02 |
| [드론 만들기] Pixhawk의 텔레메트리(Telemetry) (2) | 2020.07.02 |
| [드론 만들기] Ubuntu(우분투) 터미널 명령어 (0) | 2020.06.27 |





댓글 영역