고정 헤더 영역
상세 컨텐츠
본문
이전 글...
드론 만들기
하드웨어
QGroundControl에서 변속기(ESC) 교정하기
Pixhawk 4의 Power Management Board
QGroundControl에서 Pixhawk 4 펌웨어 설치
QGroundControl에서 Pixhawk 4 설정하기 1/2
QGroundControl에서 Pixhawk 4 설정하기 2/2
파워 분배기(PDB, Power Distribution Board)
소프트웨어
MissionPlanner와 QGroundControl
QGroundControl에서 Pixhawk 4 펌웨어 설치
QGroundControl에서 Pixhawk 4 설정하기 1/2
QGroundControl에서 Pixhawk 4 설정하기 2/2
QGroundControl에서 Pixhawk 파라미터 변경하기
VMware Workstation Player에 Virtaul Machine 만들기
VMware Workstation Player에 Ubuntu 설치하기
조립
Power Management Board에 커넥터 연결하기
변속기(ESC)와 Power Management Board 연결하기
QGroundControl에서 변속기(ESC) 교정하기
GPS, Telemetry Pixhawk 4에 연결하기
통신
개발
비행
문제해결
Pixhawk와 Emax ESC(변속기) 호환문제 해결방법
기타
완전 초짜의 드론 만들기 도전! 도전! 도전~!입니다.
맨땅에 헤딩~
인터넷 검색, 관련 사이트를 참고하여 Pixhawk 4를 이용한 중/소형 드론을 만들려고 하고 있습니다.
참고만 하세요~!
QGroundControl는 픽스호크 계열의 Flight Controller(FC)에 펌웨어 PX4 또는 ArdupPilot를 설치할 수 있다. QGC에서 펌웨어를 설치 시 기본 설정은 선택한 펌웨어의 최신 안정 버전(stable version)이다. 안정 버전 외에 beta build, daily build, 개별 사용자의 펌웨어(custom firmware)도 설치할 수 있다.
QGroundControl에서는 SiK Radio와 PX4Flow 장치의 펌웨어도 함께 설치할 수 있다. PX4Flow란 광 흐름 스마트 카메라(optical flow smart camera, 자세한 정보는 여기)를 말한다.
현재 태블릿이나 핸드폰에 QGroundControl을 설치해서 Ground Control Station으로 사용 가능하지만 FC 펌웨어 설치는 불가능하고, PC에 설치된 QGroundControl에서만 FC에 펌웨어를 설치할 수 있다.
픽스호크 4에 펌웨어를 설치하기 전에 픽스호크 4가 컴퓨터에 연결되어 있다면 USB 케이블을 컴퓨터에서 분리해야 한다. 만약 텔레메트리, PX4Flow가 연결되어 있다면 모두 컴퓨터에서 USB를 분리해야 하며 배터리가 FC에 연결되어 있어서도 안 된다.
USB가 모두 분리되었다면, QGroundControl을 실행한 후 기어 모양의 setup 아이콘을 클릭한다.

그 다음 아래 왼쪽 그림에서 붉은 동그라미가 그려진 펌웨어 아이콘을 누른다.
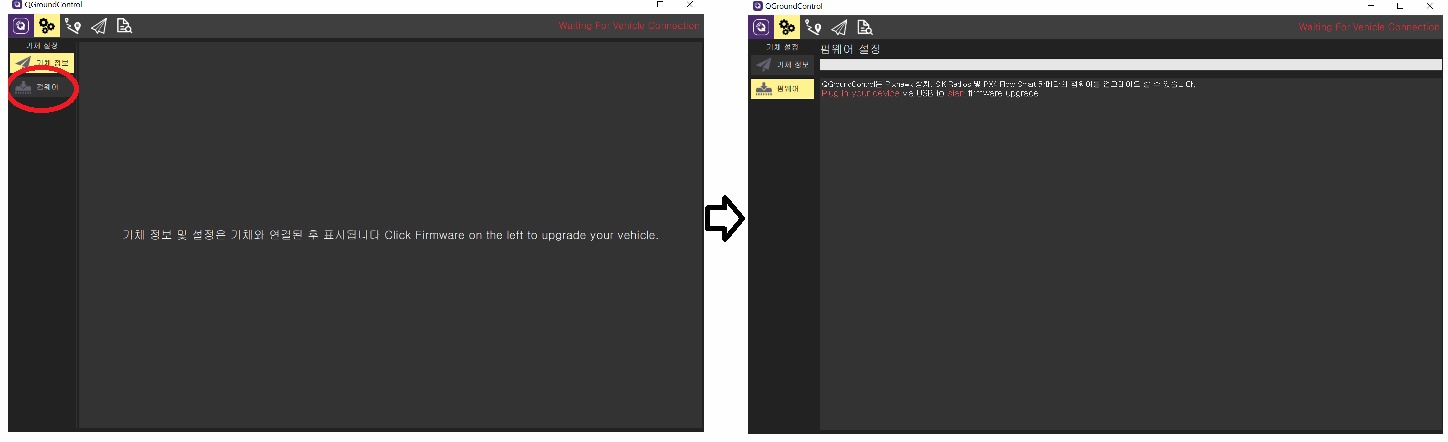
위 그림의 오른쪽 화면이 나타나면 픽스호크 4를 USB로 컴퓨터에 연결한다. 혹시 텔레메트리나 PX4Flow 등의 펌웨어도 함께 설치하려고 할 경우, USB로 컴퓨터에 연결해야 한다. 모든 USB는 USB 허브에 꽂으면 안 되고 컴퓨터의 USB 단자에 바로 연결해야 한다.
여기서는 텔레메트리나 PX4 Flow 펌웨어는 설치하지 않고, 픽스호크 4의 펌웨어만 설치한다.

픽스호크 4를 컴퓨터에 연결하면 자동으로 설정 화면이 나타난다.

먼저 위 그림의 오른쪽 선택 창에서 PX4와 ArduPilot 중 설치할 펌웨어를 선택한다.
PX4 펌웨어를 설치할 경우 연결된 FC의 최신 안정 버전(stable version)이 자동으로 선택된다. 안정 버전 이외의 버전을 설치하고 싶을 경우에는 고급설정을 클릭해서 다른 버전을 선택한다.
고급 설정에는 4 가지의 버전을 제공한다. 표준 버전(stable)의 경우 기본으로 설정된 최신 안정 버전이다. 베타 테스팅(beta)의 경우 베타(beta)/캔디데이트(candidate) 릴리스(release)로, 곧 이 버전이 새 버전으로 공표될 예정일 경우에만 가능하다. 개발자 빌드(master)의 경우는 PX4 펌웨어의 최신 빌드(build)를 말한다. 사용자 정의 펌웨어 파일은 사용자가 빌드한 펌웨어로 사용자 정의 펌웨어 파일을 선택할 경우 다음 단계에서 펌웨어 파일을 설정해주어야 한다.
모든 설정이 완료되면 QGC 화면 오른쪽 위쪽의 확인을 클릭해서 펌웨어를 설치한다.
펌웨어로 ArduPilot를 설정할 경우에는 펌웨어로 ArduPilot 선택 후 ChibiOS와 Nuttx 중 운영체제를 선택하고 그 후에는 FC를 사용할 무인 장치, Multi-Rover, Helicopter, Plane, Rover, Sub. 중 하나를 선택한다. 그 후 PX4를 설치할 때처럼 필요시 고급 설정을 선택 후 적합한 펌웨어 버전을 선택하면 된다.

모든 설정이 완료되면 위 그림의 오른쪽 위쪽의 확인을 클릭해서 펌웨어를 설치한다.

아래의 그림은 펌웨어 PX4 설치가 완료되면 마지막으로 FMU의 버전이 맞게 설치되었는지 확인한다.

설치가 완료되고 나면 몇 초 후 자동으로 구성요소의 설치 화면으로 넘어간다.
이전 FMUv2 보드에는 사용하는 FC의 플래시 메모리가 2MB일 경우에도 1MB만 사용하는 문제가 있었다. 이 문제를 해결하기 위해서 QGC에서 부트로더(bootloader)를 업데이트해서 FMUv3을 설치했다. 하지만 Pixhawk 홈페이지에서 제공하는 방법에 따르면 현재 QGC 버전에서는 QGC에서 직접 부트로더를 업데이트할 수 없고 드론 코드에서 직접 부트로더를 업데이트해야 한다고 한다.
Pixhawk 4의 경우 FMUv5를 사용하므로 상관은 없는 듯하다.
'만들기 > 드론' 카테고리의 다른 글
| 드론 만들기 - Pixhawk 4의 Power Management Board (0) | 2020.04.21 |
|---|---|
| 드론 만들기 - Pixhawk 4 (2) | 2020.04.18 |
| [드론 만들기] MissionPlanner와 QGroundControl (2) | 2020.04.15 |
| 드론 만들기 - Pixhawk 시리즈 (0) | 2020.04.15 |
| [드론 만들기] QGroundControl 설치 (9) | 2020.04.13 |





댓글 영역