고정 헤더 영역
상세 컨텐츠
본문
이전 글...
드론 만들기
하드웨어
드론 만들기 - QGroundControl에서 Pixhawk 4 펌웨어 설치
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 1/2
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 2/2
드론 만들기 - Power Management Board
소프트웨어
드론 만들기 - MissionPlanner와 QGroundControl
드론 만들기 - QGroundControl에서 Pixhawk 4 펌웨어 설치
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 1/2
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 2/2
조립
드론 만들기 - GPS, Telemetry Pixhawk 4에 연결하기
비행
드론 만들기 - 쿼드콥터(Quadcopter) 비행 원리
기타
드론 만들기 - VMware Workstation Pro 설치하기
드론 만들기 - VMware Workstation Player에 Virtaul Machine 만들기
드론 만들기 - VMware Workstation Player에 Ubuntu 설치하기
완전 초짜의 드론 만들기 도전! 도전! 도전~!입니다.
맨땅에 헤딩~
인터넷 검색, 관련 사이트를 참고하여 Pixhawk 4를 이용한 중/소형 드론을 만들려고 하고 있습니다.
참고만 하세요~!
1. 픽스호크 4의 특성과 사양

픽스호크 4는 픽스호크 시리즈 중 FMUv5를 기반으로 제일 먼저 만들어진 Flight Controller(FC)로 Holybro과 PX4팀이 공동으로 설계했다. PX4의 버전 1.7에 최적화되어 있으며 학교, 기업, 스타트업 개발자 등에 적합한 FC이다
(픽스호크 시리즈에 대해서는 여기 참고)
오픈 하드웨어인 FMUv5는 NuttX OS에 PX4를 실행한다...라고 하는데,
NuttX가 뭐지?
|
NuttX은 기술 표준을 준수하고 소형화에 중점을 둔 실시간 운영 시스템(RTOS, real-time operation system)으로 ARM, AVR, AVR32, HCS12, LM32, MIPS, RISC-V, SuperH, Xtensa XL6, Z80 등의 프로세서에 사용 가능한 운영 체제로 2007년 그레고리 너트(Gregory Nutt)에 의해 처음 공개(저작권 BSD)되었다. 8 비트에서 32 비트 마이크로 컨트롤러 환경까지 확장 가능하며 리소스를 최소한으로 구성하여 최적의 성능을 만들어내야 하는 저전력 임베디드 시스템에 최적화되어 있어 소형 장치의 운영체제로 사용되고 있다.
NuttX의 주요 운영 표준은 POSIX(Portable Operation System Interfaces)와 ANSI(American National Standards Institute)이며 현재는 Apache Software Foundation에서 지원하고 있다. |
| 출처: 위키피디아 |
PC에 설치하는 윈도우나 리룩스 같은 운영체제인데 소형 장치에 적합한 운영체제라는 말인 것 같다.
음흠... 그럼 다시 픽스호크 4에 대해서 더 살펴보자.
픽스호크 4는 이전 픽스호크 시리즈에 비교해서 계산 능력이 향상되었고 RAM이 512KB로 두 배 증가되었다. RAM 뿐만 아니라 전력 용량까지 늘어나서 개발자들이 더 생산적이고 더 효율적인 개발을 할 수 있는 환경이 만들어졌다. 자동 비행 시 더 복잡한 알고리즘과 모델도 실행할 수 있게 되었다.
새로 설계된 방진 기능으로 비행성능이 향상되어 더 정확한 해석이 가능해졌고 IMUs(Inertial Measurement)는 FC를 안정적인 응용할 수 있게 하기 위해서 고성능, 저소음으로 설계되었다. 또 새로운 센서 장착으로 더 높은 온도에서도 안전적으로 동작하게 되었다.
모든 센서의 data-ready 신호는 센서 데이터의 정확한 시간 기록을 허용해서 자동 비행 시 인터럽터와 타이머 캡처 핀(time capture pin)을 분리할 수 있게 되었다.
(timer capture란 일정 주기(duty cycle)를 측정하는 것을 말하는 것 같은데 정확히 여기서 무슨 역할인지.... 초짜의 한계...)
픽스호크 4는 포트들을 추가해서 이전 픽스호크 시리즈와 비교해서 통합성과 확장성을 넓혔고 최신 PX4 펌웨어가 미리 설치되어 있어서 사용자의 편의성도 증가시켰다.
|
|
Pixhawk 4 |
이전 버전과 비교 |
|
Main FMU Processor |
STM32F765 |
32 Bit Arm® Cortex®-M7, 동작속도 216 MHz, 메모리 |
|
입출력 Processor |
STM32F100 |
32 Bit Arm® Cortex®-M3, 24 MHz, 8KB SRAM |
|
가속도/자이로 센서 |
ICM-20689, BMI055 |
가속도/자이로 센서 2개 장착 |
|
자계 센서 |
IST8310 |
개별 자계 센서 장착 |
|
기압계 |
MS5611 |
기압 센서 장착 |
|
GPS |
ublox Neo-M8N GPS/GLONASS receiver |
magnetometer IST8310 내장 |
|
인터페이스 |
8-16 PWM 출력 (입출력 8개, FMU 8개) |
포트 종류와 개수 증가 |
|
전력 시스템 |
파워 모듈 출력: 4.9~5.5V 최대 입력 전압: 6V 최대 current sensing: 120A USB 입력 전압: 4.75~5.25V 서보 레일 입력전압: 0~36V |
최대 12S 배터리 사용 가능 *current sensing: 전류 측정 방법 중 한 방법. |
|
커넥터 |
JST-GH |
- |
|
무게 |
15.8g |
가벼워짐 |
|
크기 |
44x84x12mm |
소형화 |
|
작동/보관 온도 |
-40 ~ 85°c |
- |
2. 픽스호크 4의 포트
픽스호크 4의 포트 배치도는 다음과 같다.
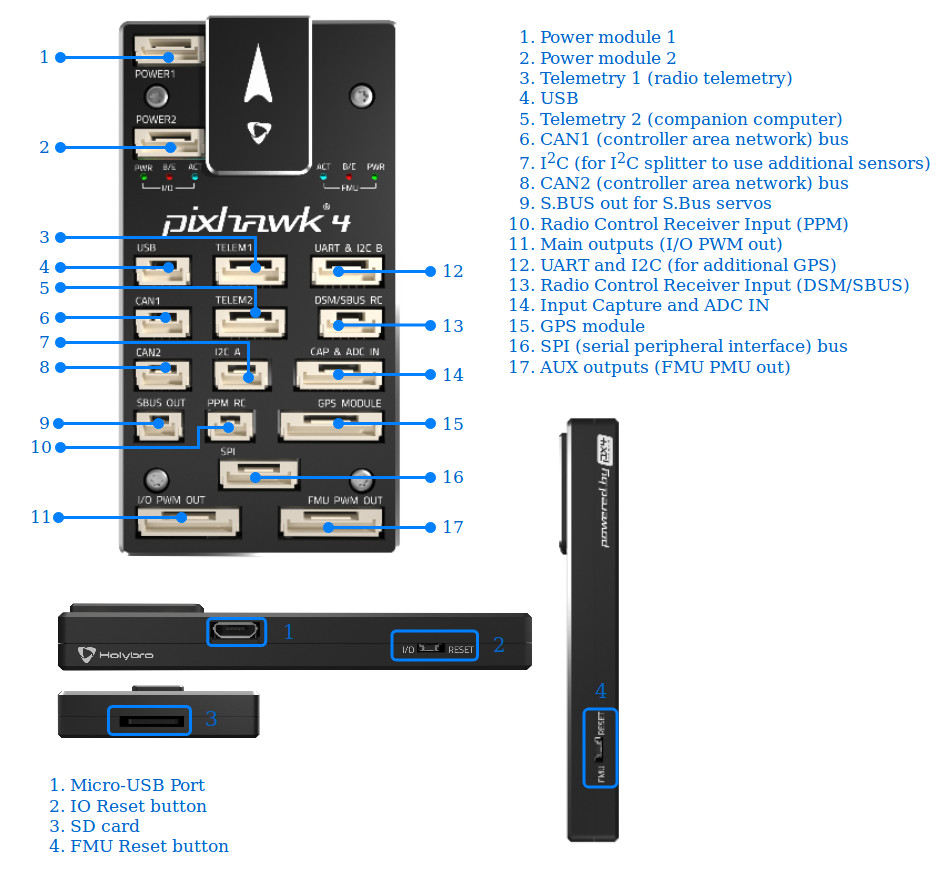
정면
1. Power Management Board를 6핀 케이블로 Power Module 1에 연결해서 FC에 전원을 공급한다.
3. TELEM 1 포트(기본 설정값)에 텔레메트리를 연결한다. 텔레메트리는 Ground Control Station에서 데이터를 수신하고 비행 중 FC와 통신한다. 기본 값으로 baudrate는 57600이다(baudrate는 1초간 전송되는 신호의 수).
5. Raspberry Pi등의 companion computer을 연결(companion computer는 와이파이로도 연결 가능).
7. RGB UI(User Interface) LED(비행 상태 표시) 연결 가능
10, 13. 직접 또는 보조 비행 모드를 무선 조종기를 통해서 FC에 보내기 위해서 PPM, DSM 또는 SBUS 무선 조종 수신기를 연결한다.
11. 모터에 PWM 신호를 보내기 위해서 10핀 케이블로 Power Management Board의 PWM-IN 포트를 연결한다.
15. 비행 중 FC의 현재 위치를 파악하기 위해서 GPS module 포트(기본 설정값)에 GPS를 연결한다. GPS의 baudrate는 대부분 GPS의 규격에 따라 자동으로 설정된다.
* 조종기 입력 같이 특정한 목적으로 사용하는 것이 아닌 경우에는 시리얼 포트의 기본 설정값을 변경해서 포트에 다른 부품을 연결할 수 있다. 예를 들면 GPS module 포트의 기본값은 GPS이지만포트도 설정값을 텔레메트리로 변경한 후 테레메트리를 포릍에 연결해 사용할 수도 있다.
아랫면
1. USB 케이블로 컴퓨터와 FC를 연결한다.
3. 필요시 SD 카드를 장착(최대 32GB 지원). 비행기록을 저장해서 비행 해석 시 사용할 수 있다.
옆면
4. FMU를 삭제하고 싶을 때 버튼을 누르면 설치된 FMU만 삭제, 그 외 설정 사항은 유지.
DSM/SBUS RC와 PPM RC 포트는 RC 수신기 전용으로만 사용하며 절대 서보, 파워 서플라이 또는 배터리 (또는 연결된 다른 수신기에)를 연결해서는 안 된다.
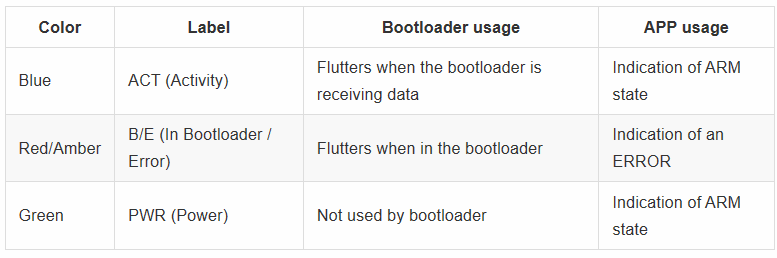
3. 픽스호크 4 상태 LED

왼쪽의 LED 3 개는 PX4의 입출력(IO, input output)의 상태를 보여주고 오른쪽 세 개의 상태 LED는 PX4의 FMU(Flight Management Unit)의 상태를 나타낸다. LED들은 전원(PWR), 부트로더 모드(B/E), 작동(ACT)을 가리킨다.
전원이 연결될 경우 FMU와 IO는 가장 먼저 부드로더를 작동시키고 그 다음 어플리케이션을 작동시킨다. 아래의 표는 상태를 표기하기 위해서 부드로더와 어플리케이션이 어떻게 LED를 사용하는지 보여준다.
4. 픽스호크 4 구매
픽스호크는 드론 용품을 판매하는 사이트뿐만 아니라 국내외 오픈 마켓 사이트에서도 쉽게 구매할 수 있다.
픽스호크 4 제조사는 Holybro 사이지만 중국 판매 사이트에서 검색해보면 다른 중국 업체가 복제품을 만들어서 저렴한 가격으로 판매하고 있는 걸 볼 수 있다. 하지만 안정성을 위해서 가능하면 Holybro사의 Pixhawk 4를 구매하는 게 나을 것 같다.
하지만 중국 사이트에서는 Holybro 사 제조라고 하는 짝퉁도 있기 때문에 구매 시 가격이 너무 저렴하면 의심을 해봐야 할 것 같다. 구매자가 많고 후기가 좋은 제품을 구입하면 그나마 짝퉁을 구매할 확률을 줄일 수 있을 것 같다.
안전하게 Holybro 사의 쇼핑몰에서 구입하는 방법도 있지만, 가격이 비싸다.
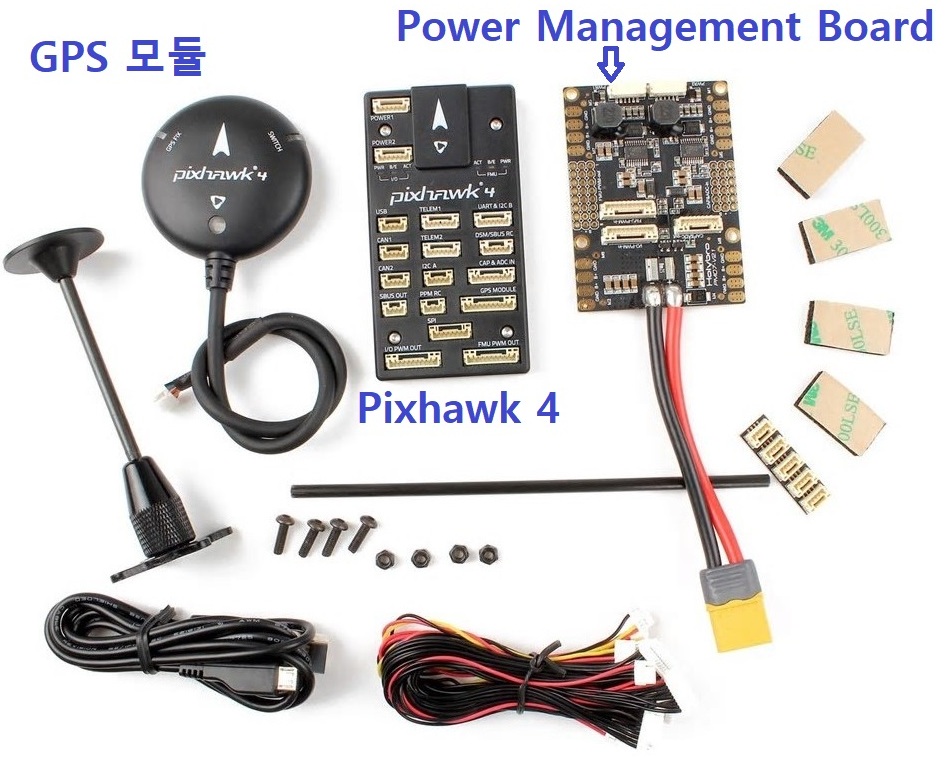
픽스호크 4는 FC, GPS 모듈을 포함한 풀세트와 GPS 모듈을 제외한 FC 세트를 구매할 수 있다. 픽스호크의 케이스는 알루미늄과 플라스틱 두 가지가 있는데 가격 차가 크다. 플라스틱은 저렴하지만 강도가 낮아서 알루미늄에 비해 작음 충격에도 파손 위험이 크다. 따라서 만들려는 드론의 사용 목적을 고려해서 적합한 케이스 종류를 선택한다.
이전 알리 익스프레스 세일 기간에 GPS 모듈을 제외한 플라스틱 케이스 픽스호크 4를 구매했고, 주문 후 한달이 지나서 받았다.

Power Management Board, Pixhawk 4, UBS 케이블을 포함한 케이블 세트, Power Management와 Board, 사용 설명서, 픽스호크 4의 Pinout 도면이 동봉되어 있다.

동봉된 케이블과 기타 부품은 다음과 같다.
- I2C splitter Board: 1개
- 6 to 6 pin cable (power): 3 개
- 4 to 4 pin cable (CAN): 2 개
- 6 to 4 pin cable (Data): 1 개
- 10 to 10 pin cable (PWM): 2 개
- 8 to 8 pin cable(AUX): 1 개
- PPM/SBUS out cable: 1개
- XSR receiver cable 1 개
- DSMX receiver cable: 1 개
- SBUS receiver cable: 1 개
- USB cable: 1개
- 6*3 2.54mm pitch Horizontal Pin: 1 개
- 8*3 2.54mm pitch Horizontal Pin: 1 개
- Foam Set 1: 개
구매한 지 시간이 좀 흘러서 그런지 요즘 판매되는 것과 내용물이 좀 달라진 것 같다.
픽스호크의 크기와 무게를 스쳐 지나가며 숫자로만 봐서 그런지 처음 제품을 받고는 생각보다 작고 가벼워서 놀랐다. 마감처리도 깔끔한 게 나쁘지 않았다.
이젠... 드론을 만들어서 날려봐야 하는데, 모르는 게 너무 많아서 공부해야 할 내용도 너무 많고 실수도 너무 많아서 언제 다 만들지 모르겠다....
이전 글...
드론 만들기
하드웨어
드론 만들기 - QGroundControl에서 Pixhawk 4 펌웨어 설치
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 1/2
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 2/2
드론 만들기 - Power Management Board
소프트웨어
드론 만들기 - MissionPlanner와 QGroundControl
드론 만들기 - QGroundControl에서 Pixhawk 4 펌웨어 설치
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 1/2
드론 만들기 - QGroundControl에서 Pixhawk 4 설정하기 2/2
조립
드론 만들기 - GPS, Telemetry Pixhawk 4에 연결하기
비행
드론 만들기 - 쿼드콥터(Quadcopter) 비행 원리
기타
드론 만들기 - VMware Workstation Pro 설치하기
드론 만들기 - VMware Workstation Player에 Virtaul Machine 만들기
드론 만들기 - VMware Workstation Player에 Ubuntu 설치하기
'만들기 > 드론' 카테고리의 다른 글
| [드론 만들기] 조종기(Radio Control) (0) | 2020.05.02 |
|---|---|
| 드론 만들기 - Pixhawk 4의 Power Management Board (0) | 2020.04.21 |
| 드론 만들기 - QGroundControl에서 Pixhawk 4 펌웨어 설치 (1) | 2020.04.16 |
| [드론 만들기] MissionPlanner와 QGroundControl (2) | 2020.04.15 |
| 드론 만들기 - Pixhawk 시리즈 (0) | 2020.04.15 |





댓글 영역