고정 헤더 영역
상세 컨텐츠
본문
이전 글...
드론 만들기
하드웨어
[드론 만들기] Pixhawk의 텔레메트리(Telemetry)
[드론 만들기] QGroundControl에서 Pixhawk 4 펌웨어 설치
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 1/2
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 2/2
[드론 만들기] Pixhawk 4의 Power Management Board
[드론 만들기] 파워 분배기(PDB, Power Distribution Board)
소프트웨어
[드론 만들기] MissionPlanner와 QGroundControl
[드론 만들기] QGroundControl 사용방법 1/3
[드론 만들기] QGroundControl 사용방법 2/3
[드론 만들기] QGroundControl에서 Pixhawk 4 펌웨어 설치
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 1/2
[드론 만들기] QGroundControl에서 Pixhawk 4 설정하기 2/2
[드론 만들기] QGroundControl에서 Pixhawk 파라미터 변경하기
조립
[드론 만들기] Power Management Board에 커넥터 연결하기
[드론 만들기] 변속기(ESC)와 Power Management Board 연결하기
[드론 만들기] GPS, Telemetry Pixhawk 4에 연결하기
비행
[드론 만들기] 쿼드콥터(Quadcopter) 비행 원리
기타
[드론 만들기] VMware Workstation Pro 설치하기
[드론 만들기] VMware Workstation Player에 Virtaul Machine 만들기
[드론 만들기] VMware Workstation Player에 Ubuntu 설치하기
완전 초짜의 드론 만들기 도전! 도전! 도전~!입니다.
맨땅에 헤딩~
인터넷 검색, 관련 사이트를 참고하여 Pixhawk 4를 이용한 중/소형 드론을 만들려고 하고 있습니다.
참고만 하세요~!
처음 드론을 날렸을 때 소형 드론이라서 그런지 몰라도 조종기(RC, Radio Control)를 다루는 너무 어려워서 수십 번 드론을 바닥으로 내리꽂았다. 텔레비전에서는 사람들이 쉽게 조종하는 것처럼 보였는데 직접 해보니... 아니었다.
어머니에게 도움되는 드론을 만들어볼까라는 마음으로 드론 만들기를 시작했다보니(이 속도로 만들다가는 언제 만들기가 끝날지 모르겠지만) 어머니가 조종기를 사용하는 것은 어려울 것 같아서 조종기 없는 드론을 만들어야겠다는 생각을 했다. 그래서 드론 부품을 구입하면서도 조종기는 아예 구입도 하지 않았을 뿐만 아니라 기본 원리조차도 그림만 보며 지나갔다.
시간이 좀 생겨서 다시 px4 사이트를 찬찬히 읽어보다, 조종기를 하나 구매해볼까라는 생각이 들어서 한번 정리를 해봤다.
1. Radio Control은 뭔가?
Radio Control(RC)는 문자 그대로 무선 제어이다. 즉 A라는 장치가 있을 경우 B라는 조정장치를 이용해서 A라는 장치를 먼거리에서 무선통신으로 제어하는 것이다.
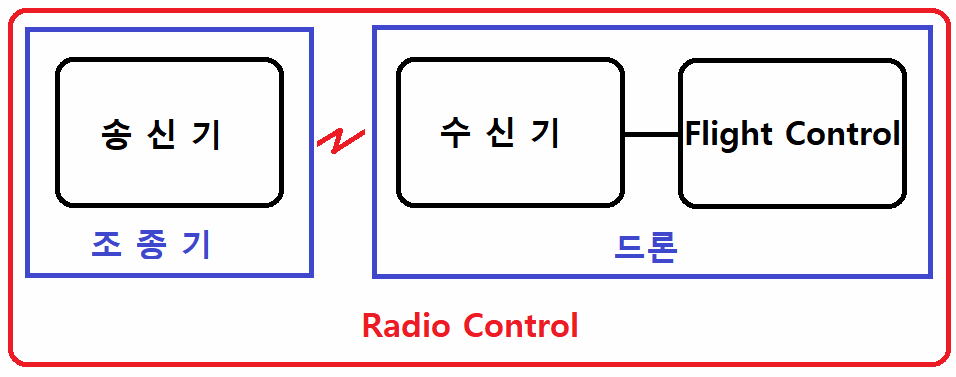
경우에 따라서 RC에는 순수 무선장치인 송신기와 수신기만을 의미하는 경우도 있고 또는 A와 B 장치 모두를 포함해서 RC라고 하는 경우도 있다. 위의 그림은 후자를 적용한 드론의 RC 블록도이다.
드론의 Radio Control는 송신기(transmitte)가 장착된 조종기와 Flight Control(FC)에 연결되어 있는 수신기(receiver)로 이루어져 있다.
조종기는 사용자가 먼 거리에서 드론을 조종하는 장치다. 사용자가 직접 조종기의 스틱 등을 움직이면 송신기는 그 정보를 전송하고 수신기는 송신기에서 보낸 정보를 실시간으로 수신해서 FC에 보낸다. 그러면 FC는 전달받은 정보를 해석해서 드론을 조종한다.
드론을 직접 조종하지 않고 자동비행이나 임무수행 비행만을 할 경우라면 굳이 RC를 사용하지 않아도 된다. 이럴 경우 Flight Control 설정 시 RC 사용을 해제하면 된다.
2. QGroundControl에서 픽스호크 RC 해제하기
픽스호크에서도 RC는 필수요소가 아닌 선택 요소이다. 따라서 RC를 사용하지 않을 경우에는 파라미터 설정에서 COM_RC_IN_MODE을 1로 변경해서 RC 사용을 해제하면 된다.
해제 방법은 아래와 같다.
먼저 QGroundControl을 실행시킨다.
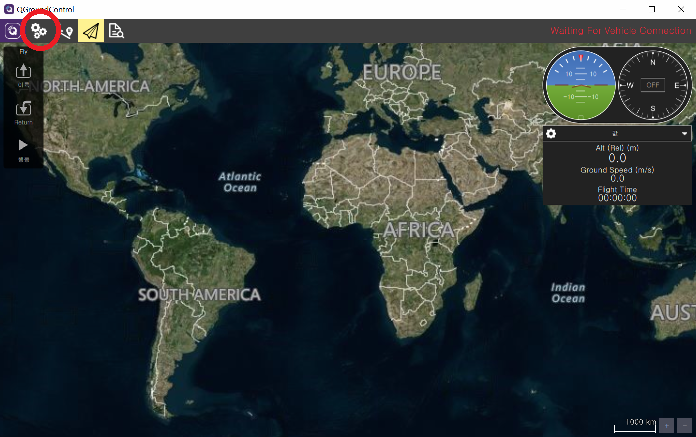
동그라미가 그려져 있는 톱니바퀴 아이콘을 클릭하고 픽스호크를 USB를 사용해서 컴퓨터에 연결한다. 그전에 픽스호크를 연결해도 상관은 없다. 만약 픽스호크를 연결한 상태에서 QGroundControl을 실행시키면 바로 아래 화면이 나온다.

위에 화면에서 보듯이 RC 설정이 안 되어 있어서 붉은색으로 표시가 되어 있다.
붉은 동그라미가 그려진 파라미터를 클릭한다.
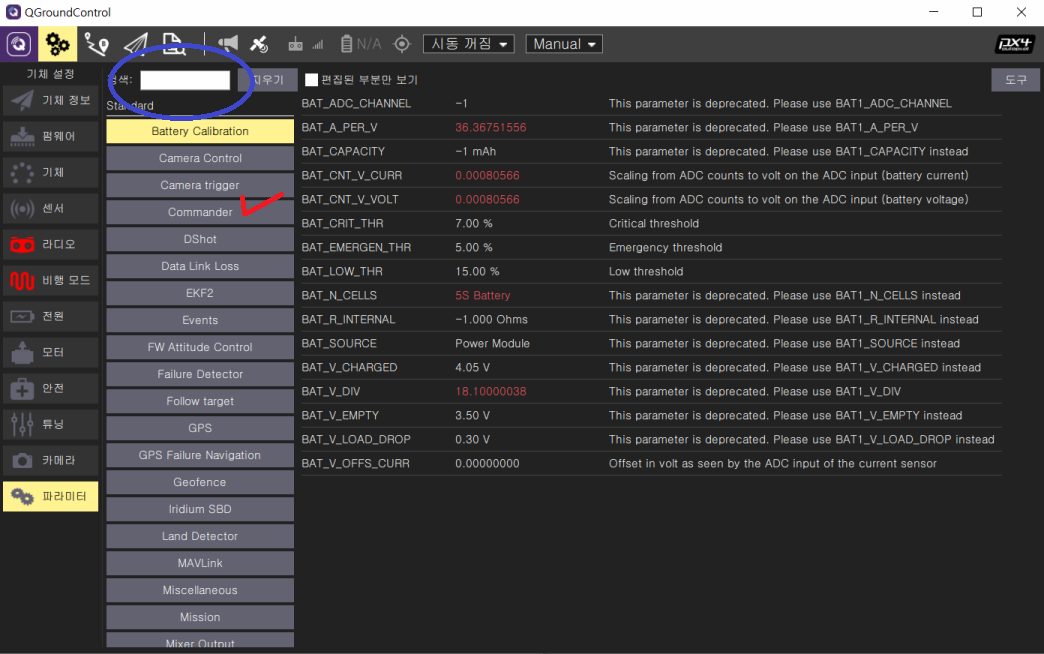
위의 파란색 동그라미가 그려진 검색란에 파라메터 이름을 입력한 후에 엔터키를 누른다. 그 후 나타나는 목록 중에 COM_RC_IN_MODE을 클릭한다.
(파라미터 변경 방법은 QGroundControl에서 Pixhawk 파라미터 변경하기 참조)
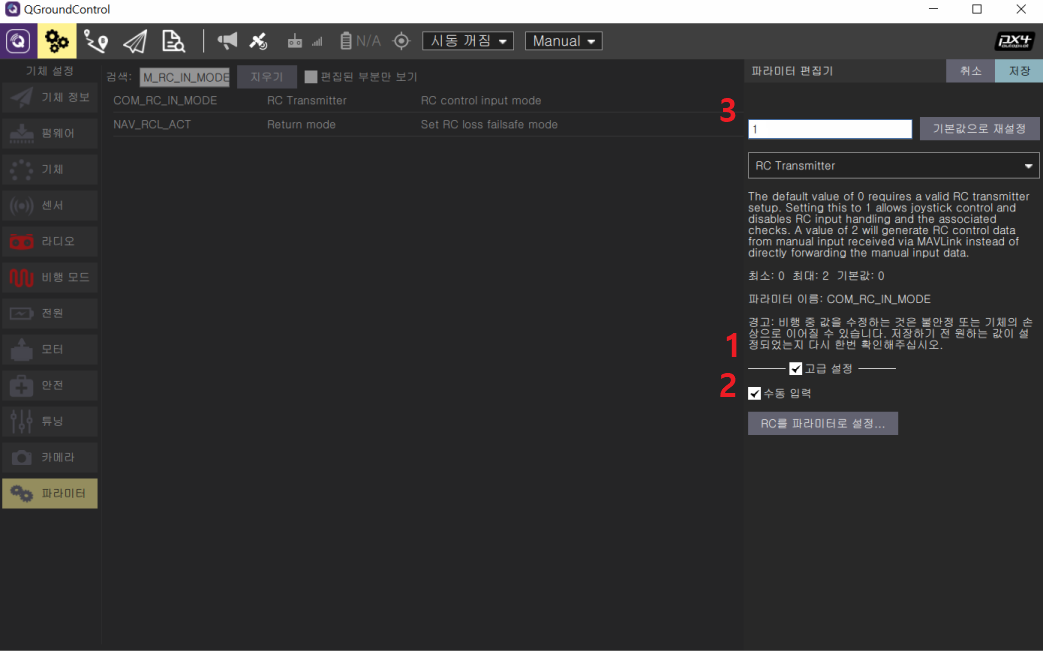
먼저 1번의 고급설정을 클릭하고 2번 수동 입력을 클릭한 후에 3번 빈란에 1을 입력한 후에 저장을 누르면 끝난다.

위의 그림에서 보듯이 라디오의 글자색이 변했다. 옆에 창의 붉은 줄이 쳐진 곳에 보면 No RC Checks로 변경된 것을 확인할 수 있다.
3. 조종기

조종기는 사용자가 먼 거리에서 드론 비행을 직접 조종하도록 도와주는 장치다.
드론의 조종기는 기본적으로 롤(roll), 피치(pitch), 요(yaw), 스로틀(throttle)의 4가지의 조종장치를 가지고 있어야 한다.
롤은 드론을 왼쪽 또는 오른쪽, 피치는 드론의 앞과 뒤로 이동한다. 요는 상공에서 원 또는 일정한 모양을 그리면서 드론을 시계 또는 시계 반대방향으로 회전시킨다. 스로틀은 드론으로 보내는 전력 양을 조절해서 드론을 더 빠르게(더 높이) 또는 더 느리게(낮게) 비행하게 한다.
그 외에 조종기의 종류와 성능에 따라서 자동비행모드인 arming, 이륙, 착륙, RTL(Return to Launch, 복귀), 임무수행 등을 추가로 설정할 수 있다.
2.1 모드
조종기에 있는 2개의 스틱을 조작하는 방법에 따라서 모드 1, 2, 3, 4로 나눠진다.
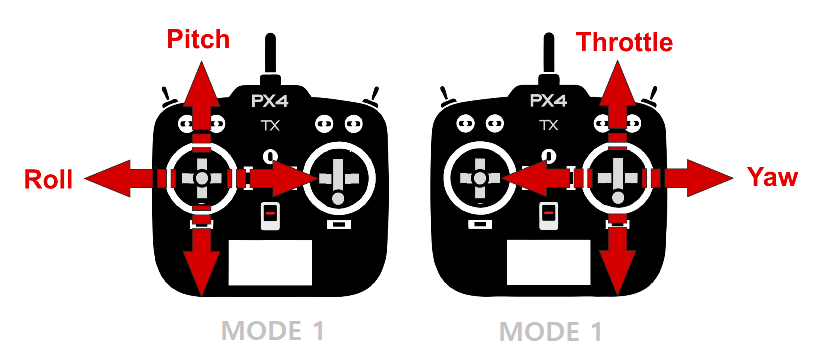
모드 1은 왼쪽 스틱이 피치와 롤, 오른쪽 스틱이 스로틀과 요를 조정한다.
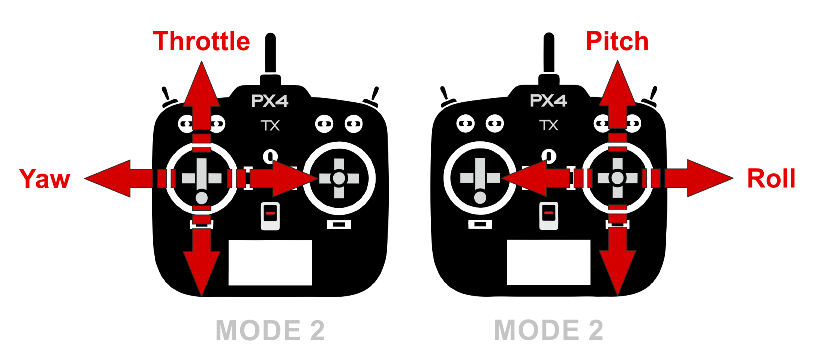
모드 2는 드론 조종기에서 대중적으로 사용하는 모드로 모드 1과는 반대로 왼쪽 스틱이 스로틀과 요, 오른쪽 스틱이 피치와 롤을 조정한다.
모드 3은 모드 1에서 요과 롤의 위치가 바뀐 형태이고 모드 4는 모드 2에서 롤과 요의 위치가 바뀐 형태이다. 모드 3과 모드 1 그리고 모드 4와 모드 2는 동일한 스틱 구조이다.
드론 비행에서 조종기의 모드 중 모드 2를 가장 많이 사용하는 이유는 스틱의 움직임과 드론 비행 조종이 가장 직관적이라서 조정하기가 쉽기 때문이지만 모드 선택은 개인의 취향이다.
조종기를 구입한 후 모드를 변경하고 싶을 경우에는 모드 변경 방법은 조종기마다 다르기 때문에 구입 시 동봉되어 있는 사용설명서를 참조해서 모드를 변경하면 된다.
2.2 짐벌(Gimbals)
조종기의 스틱을 짐벌이라고 하는데 카메라를 설치 시 필요한 짐벌과는 다른 것이다.
송신기를 선택할 때 짐벌의 품질도 중요한 고려요소 중 하나이다. 왜냐하면 짐벌의 품질이 부드러운 드론 비행에 영향을 미치기 때문이다. 저렴한 조종기를 다루어보면 스틱이 너무 헐겁거나 빡빡해서 스틱 조정하는 게 쉽지 않기도 하지만 사실 초보자는 그런 미묘한 차이를 알기가 쉽지가 않다.
2.4 Pinch 또는 Thumbs
조종기의 스틱을 잡는 방법이다. 이게 왜 중요한지 모르겠지만...
Pinch는 두 손가락으로 스틱을 잡아서 조종하는 방법이고, thumbs는 엄지손가락으로만 스틱을 조절하는 방법이다. 당연히 스틱을 잡는 방법에는 정답은 없다. 보통 스틱이 긴 경우에는 Pinch가, 스틱이 짧은 경우에는 thumbs가 조정하기 편하다.
조종기에 따라 스틱의 길이나 모양이 다를 수 있는데, 구입 시 조종기의 사용자 후기를 보고 스틱 잡는 방법을 선택하거나, 개인의 취향에 따라 선택하면 된다.
2.5 스위치(switches)
위의 조종기 사진에서 보듯이 조종기는 짐벌(스틱)만 가지고 있는 것이 아니라 스위치가 뿔처럼 여러 개 튀어나와 있다. 이런 스위치는 슬라이더 형식일 수도 있고 다이얼 형식일 수도 있다.
스위치는 arming, 복귀 등 드론 비행 중 특정 비행 모드로 변경할 때 사용할 수 있다. 스위치의 설정값은 조종기 설정 시 설정하면 된다. 당연히 스위치의 개수가 많을수록 여러 가지 비행 모드를 설정할 수 있다.
2.6 텔레메트리 지원
조종기가 텔레 메트리를 지원할 경우 드론의 배터리 전압, 무선 신호 강도, 경고 등의 중요한 정보를 조종기에서 수신할 수 있다. 이 정보들은 텔레메트리에 장착되어 있는 스크린으로 제공할 수도 있고 조종기에 따라서 음성으로 제공될 수도 있다. 특히 음성 지원의 경우에는 비행 중 주요한 경고를 놓칠 염려가 없기 때문에 비행에만 집중할 수 있는 효과도 있다.
2.8 외부 모듈(external module)
조종기에는 송신기가 장착되어 있지만 조종기 중에는 외부 모듈을 지원하는 조종기가 있다. 이런 조종기는 모듈 베이(module bay)를 가지고 있는데 이곳에 쉽게 외부 모듈을 장착할 수 있다.
외부 모듈이 설치되면 다른 프로토콜을 사용하는 수신기 또는 다른 주파수로도 통신이 가능하게 되어 조종기의 유연성, 확장성이 높아진다.
2.9 운영체제(Operating System)
모든 조종기들은 각자의 운영체제를 가지고 있는데, 대부분의 제조사는 자체의 운영체제를 가지고 있다.
운영체제 중 오픈 소스인 OpenTX는 텔레메트리와 음성을 지원을 하기 때문에 드론의 상태 정보에 따른 경고를 조종기에서 소리로 알릴 수 있다.
대중적으로 사용하는 몇몇 조종기의 제조사에는 자체 운영체제 외에도 OpenTX을 포함하고 있는 경우도 있다.
2.10 배터리 수명
고성능 조종기는 충전장치가 내장된 리튬 이온 배터리가 사용하지만 저가의 조종기의 경우 AA 배터리를 사용한다.
리튬이온 배터리의 경우 한번 충전으로 며칠 동안 비행이 가능하지만 고가에 방전된 후 충전을 하려면 시간이 걸린다. 또 리튬 배터리는 충전, 관리 시 폭발 위험성 등의 유의해야 할 요소가 있어 번거로움도 있다.
AA 배터리의 경우 비행 중 배터리가 방전되면 교환만 하면 되기 때문에 재충전의 시간이 필요 없고 관리도 쉽다. 하지만 AA 배터리가 초기 비용은 낮지만 장기간으로 보면 리튬이온 배터리보다 더 저렴하지 않을 수도 있다.
3. 수신기

수신기는 송신기에서 보낸 정보를 수신해서 FC에 보내는 역할을 한다.
보통 송신기와 수신기가 한 쌍으로 함께 판매되지만 따로 수신기 구매할 경우에는 송신기와 동일한 주파수 영역에서 작동하고 동일한 프로토콜인지 확인해야 한다.
4. 프로토콜(protocol)
프로토콜이란 컴퓨터 간 사이에 정보를 주고받는 통신방법에 대한 규칙과 약속을 말하는데, 드론의 무선 통신에서 프로토콜이라면 먼저 송신기와 수신기 사이(송신기 프로토콜)와 수신기와 Flight Control 사이(수신기 프로토콜)의 통신방법이 있다.
수신기 프로토콜의 종류는 다양하다. PWM, PPM 등 보편적으로 사용하는 프로토콜과 SBUS(Futaba, Frsky), IBUS(Flysky) 등 조종기 제조사가 사용하는 프로토콜이 있다.
송신기 프로토콜은D8 (Frsky), DSM (Spektrum), AFHDS (Flysky) 등 거의 대부분 제조사 각자의 고유한 프로토콜을 사용한다. 동일한 제조사라고 동일한 프로토콜을 사용하는 것도 아니며 몇몇 제품은 복수의 프로토콜을 지원하기도 한다.
프로토콜 중 대중적으로 사용하고 있는 프로토콜은 PWM(Pulse Width Modulation), PPM(Pulse Position Modulation), Digital Protocols (SBUS, IBIS, DSM2/DSMX)등이 있다.
- PWM(Pulse Width Modulation, 펄스폭 변조)
가장 일반적이고 기본적인 무선 제어 프로토콜로 고전적인 방법이지만 수신기 프로토콜로 여전히 많은 모델에서 사용하고 이다.
펄스 진폭의 너비로 스틱 제어와 스로틀 위치를 나타낸다. 진폭의 크기는 최소 1000us, 최대 2000us의 너비를 갖는데 FC는 수신기에서 보낸 이 너비를일정 시간(1초) 동안 검출해서 신호의 의미를 해석한다.
아날로그 신호로 각 신호마다 주파수가 다르기 때문에 송신기에서 보내는 동작 한 개당 한 개의 채널이 필요하다. 채널마다 FC와 수신기 사이에 개별적인 연결 전선이 필요해서 채널이 많을수록 전선의 수도 늘어난다. 요즘은 복잡한 배선과 느린 속도 때문에 저렴한 가격에도 잘 선호하지 않는다.
- PPM(Pulse Position Modulation, 펄스 위치 변조)

PWM에서 향상된 변조방식으로 일정한 시간 간격 내에서 일정한 크기의 펄스 위치를 달리해서 신호의 차이를 두는 방식으로 수신기 프로토콜로 사용이 된다. 따라서 최대 8개의 채널을 한 번에 보낼 수 있기 때문에 FC와 수신기 사이에는 한 개의 신호선만 있으면 된다. 즉 FC와 수신기 사이에는 신호선, 접지선, 전원선만 필요하다.
PWM보다는 빠르지만 직렬 통신(serial communication)과 비교하면 정확성이 떨어진다.
- Serial Protocols (SBUS, IBIS)
디지털 프로토콜로 펄스의 너비나 시간을 조절해서 정보를 보내는 것이 아니라 정보를 디지털 신호 1, 0로 한 비트씩 순차적으로 보내는 통신 방식을 말한다. 응답 시간이 빠를 뿐만 안니라 정확성도 매우 높아 선호하는 수신기 프로토콜 방식이다.
SBUS (S.BUS, Serial BUS)는 시리얼 통신 방법 중 하나로 Frsky, Futaba가 사용하는 프로토콜로 한 개의 신호선으로 최대 18개 채널을 지원할 수 있다.
IBUS는 Frsky의 새로운 시리얼 통신 프로토콜로 썅 방향 통신이 가능하다.
- DSM2/DSMX
DSM2 송신기와 수신기 사이의 송신기 프로토콜로 잡음과 간섭에 강하다.
DSMX은 DSM2에서 향상된 프로토콜로 짧은 시간(ms) 이내에 신호가 끊어질 경우 새로운 주파수로 채널을 변경한다. 신뢰성은 DSMX가 높지만 DSM2도 여전히 선호되는 프로토콜 방식이다.
5. 픽스호크(PX4)와 호환되는 수신기
Flight Control(FC)을 구입한 후 조정기를 사용해서 드론을 비행할 계획이라면, 먼저 FC가 어떤 무선 통신으로 어떤 프로토콜을 지원하는지 확인한 후 조정기를 선택해야 한다.
픽스호크(PX4)가 지원하는 수신기 프로토콜은 아래와 같다.
- 모든 Spektrum DSM RC 수신기
- 모든 Futaba S.BUS과 S.BUS2 RC 수신기
- 모든 FrSky PPM과 S.Bus 모델
- Graupner HoTT
- 다른 제조사의 모든 PPM 모델
수신기의 프로토콜 종류에 따라서 픽스호크 4에 연결하는 부분이 다르다.
- Spektrum/DSM 또는 S.BUS 수신기

- PPM 수신기
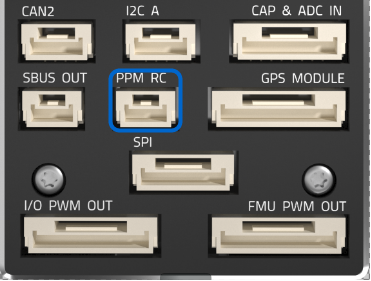
채널 당 고유 주파수를 갖는 PPM와 PWM 수신기는 PPM 엔코더를 통해서 PPM RC 포트에 연결한다.
5. 송신기와 수신기 연결(binding)
Radio Control의 가장 기본적인 요소는 조종기의 송신기와 드론의 수신기의 호환이다. 서로 호환되지 않는 기종일 경우 드론과 조종기는 서로 통신할 수 없다.
FC가 지원하는 프로토콜에 맞게 호환되는 송, 수신기를 결정했다면 이젠 송신기와 수신기 사이의 통신을 위해서 송신기와 수신기를 연결해야 한다.
송신기와 수신기의 연결 방법은 제품마다 다르기 때문에 구입한 제품의 설명서를 참조해서 연결하면 된다.
픽스호크의 경우 Specktrum 수신기를 사용한다면 QGroundControl을 이용해서 연결할 수 있다. (톱니바퀴 아이콘 -> Radio Setup > Spectrum Bind)
송신기와 수신기 연결은 한 번만 하면 되지만, 만약 송신기나 수신기의 펌웨어를 변경할 경우 연결은 끊어진다. 또 다른 송신기에 수신기를 연결할 경우에도 이전의 송, 수신기 연결은 끊어진다.
동일한 송신기에 여러 개의 수신기를 연결해 여러 대의 드론을 동시에 조정할 수 있지만 수신기에는 꼭 하나의 송신기만 연결해야 한다.
5. 채널
송, 수신기의 선택에서 중요한 요소 중 하나는 송, 수신기가 얼마나 많은 채널을 지원하는가이다. 왜냐하면 채널의 수가 무선으로 드론에게 명령을 내릴 수 있는 개수를 의미하기 때문이다.
채널의 수는 수신기와 FC를 연결하는 수신기 프로토콜에 따라 결정된다. 예를 들자면 고성능 수신기 프로토콜인 SBUS는 16 채널까지 지원하는 반면에 PPM의 경우는 8 채널까지 지원한다.
드론의 경우 최소 4개의 채널(롤, 피치, 요, thrust)이, rover의 경우 최소 두 개의 채널(스티어링과 스로틀)이 필요하다. 채널이 여유가 있다면 특정 명령, 예를 들면 Arming, RTL(return to launch)로 사용할 수 있다.
6. 통신 범위(range)
통신 범위란 조종기와 드론 사이 통신이 가능한 거리를 말한다.
무선 제어 시스템에서 통신 범위에 영향을 미치는 요소는 많다.
장애물이 있을 경우 송신기와 수신기 사이의 통신 방해로 통신 범위가 감소하고, 송신기의 출력이 높아질수록 더 먼 거리까지 통신이 가능하지만 법적 제약이 있으므로 유의해야 한다. 또 다른 요소는 수신기의 민감도이다. 수신기의 민감도가 높을수록 더 먼 거리에서도 수신기가 신호를 감지할 수 있다. 드론 통신에 사용하는 주파수에 따라서도 통신 범위가 달라진다.
드론에서 사용하는 송, 수신기는 일반적으로 2.4 GHz에서 무선 통신을 하는데 보통 300m에서 비행환경에 따라 최대 1.5km까지 통신이 가능하다. 만약 더 낮은 주파수 범위에서 통신할 경우 동일한 전력으로 더 먼 거리까지 통신이 가능하지만 저주파수의 경우 고주파수보다 더 큰 안테나를 필요로 한다. 드론은 무게에 민감하기 때문에 사용목적에 맞게 장, 단점을 잘 고려하여 송, 수신기를 선택한다.
5. 조종기 선택
처음 드론을 만들어보려는 초보자라면 조종기를 선택하는 것이 쉽지 않다.
조종기의 경우 성능이 가격에 정확하게 비례한다고 하니 초보자라면 일단 저가의 조종기를 구입해서 사용해보는 것도 나쁘지 않을 것 같다.
대중적으로는 Futaba 송, 수신기, 송신기 FrSky Taranis X9D와 수신기 FrSky X8R을 많이 사용한다.
픽스호크(PX4)에서는 FrSky Taranis X9D과 FrSky X8R을 많이 사용한다.
어느 정도 전문지식이 있다면 위에서 언급한 조종기의 특성, 예를 들면 텔레메트리 지원 유/무, 배터리 종류, 통신 프로토콜, 채널 개수 등을 고려해서 조종기를 선택하면 된다.
송, 수신기를 선택해야 할 때 추가로 고려해야 할 사항은 동일한 회사라도 사용하는 송, 수신기 사이의 통신 프로토콜이 다를 수 있기 때문에 동일한 제조사의 제품이라도 호환이 되는지 확인하고 구입해야 한다.
물론 그전에 수신기의 프로토콜이 Flight Control과 호환이 되는지 확인해야 한다.
'만들기 > 드론' 카테고리의 다른 글
| [드론 만들기] VMware Workstation Pro 설치하기 (0) | 2020.05.13 |
|---|---|
| [드론 만들기] 커넥터(connector) (0) | 2020.05.06 |
| 드론 만들기 - Pixhawk 4의 Power Management Board (0) | 2020.04.21 |
| 드론 만들기 - Pixhawk 4 (2) | 2020.04.18 |
| 드론 만들기 - QGroundControl에서 Pixhawk 4 펌웨어 설치 (1) | 2020.04.16 |





댓글 영역